
Consórcio
Promotores:

Empresas subcontratadas:

Financiamento
Contacto: Prof. Carlos Silvestre (cjs@isr.ist.utl.pt)
Índice
Resumo
Relatórios Técnicos
Publicações
Resumo
Este projecto tem como objectivo o desenvolvimento de ferramentas robóticas e
técnicas avançadas para a inspecção de infra-estruturas críticas (ICs) com a finalidade
de dotar a indústria nacional de meios avançados de diagnóstico. O custo envolvido na
construção e manutenção de ICs tais como pontes, barragens, linhas de transporte de
energia e chaminés industriais, e as consequências materiais e imateriais das suas falhas
justificam a existência de um programa de acompanhamento e diagnóstico do estado de
risco da estrutura que permita decidir quando realizar as obras necessárias de
manutenção preventiva ou de reparação.
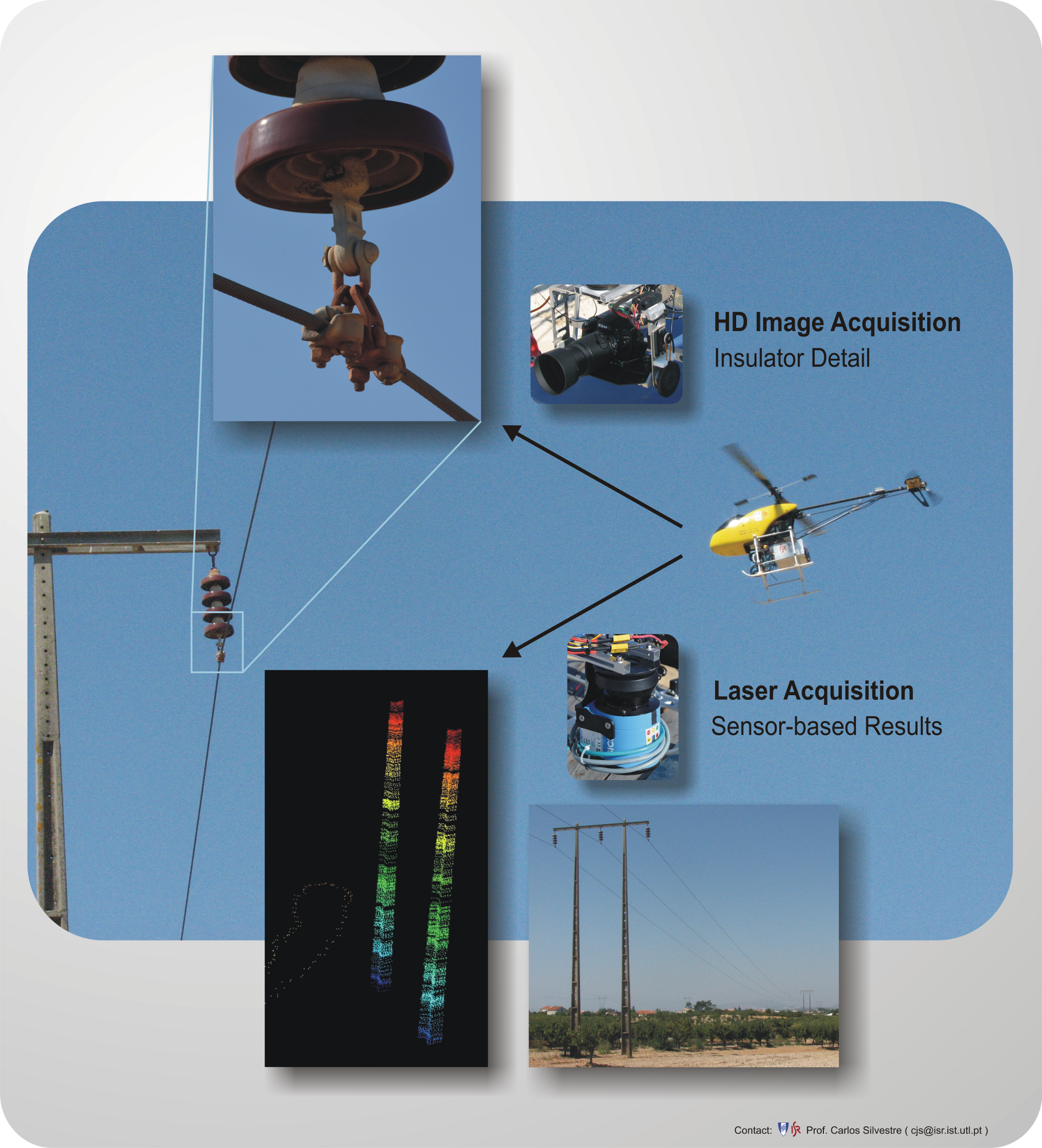
No âmbito deste projecto será desenvolvido um Helicóptero Autónomo para a inspecção
de ICs e as suas capacidades serão demonstradas em três cenários de operação realistas.
O projecto reúne uma equipa multidisciplinar com competências num vasto espectro de
áreas chave que vão desde a inspecção de pontes, viadutos e barragens, utilizando
técnicas clássicas, inspecção aérea de linhas de transmissão de energia utilizando
imagem vídeo e laser instalados em helicópteros tripulados, inspecção de chaminés
industriais utilizando câmaras infravermelho, visão por computador, robótica, sistemas
avançados de navegação, condução e controlo e aquisição e processamento dos dados
de sensores.
O consórcio consiste em três empresas (HAGEN, LABELEC, e BRISA), uma
universidade (Instituto Superior Técnico), um instituto de transferência de tecnologia
(Instituto de Soldadura e Qualidade), um laboratório do estado (Laboratório Nacional de
Engenharia Civil), e um instituto de investigação Francês (Centre National de la
Recherche Scientifique CNRS, Sophia Antipolis).
A composição da equipa de investigação reflecte o objectivo de maximizar a
incorporação de competências nacionais ao nível científico e tecnológico, e
simultaneamente conta com o know-how de um dos lideres mundiais da área dos
veículos de descolagem vertical para inspecção de ICs.
Visão Geral do Projecto

(Clique na imagem acima para ver/salvar o vídeo)
Voltar ao Início
Relatórios Técnicos Entregues
Relatório Técnico Intercalar, entregue em Junho de 2011 (período de reporte: 2009/04/01 - 2011/03/31).
Relatório Técnico (pedido de extensão), entregue em Fevereiro de 2012 (período de reporte: 2011/04/01 - 2011/12/31).
Relatório Técnico Auxiliar, entregue em Julho de 2013 (período de reporte: 2011/04/01 - 2013/03/31).
Relatório Técnico Final, entregue em Julho de 2013 (período de reporte: 2009/04/01 - 2013/03/31).
Voltar ao Início
Publicações
[1] D. Antunes, C. Silvestre, and R. Cunha. On the design of multi-rate tracking controllers: Application to rotorcraft guidance and control. International Journal of Robust and Non-linear Control, 20(16):1879 – 1902, 2010.
[2] P. Batista, C. Silvestre, and P. Oliveira. Sensor-based complementary globally asymptotically stable filters for attitude estimation. In Decision and Control, 2009 held jointly with the 2009 28th Chinese Control Conference. CDC/CCC 2009. Proceedings of the 48th IEEE Conference on, pages 7563 –7568, dec. 2009.
[3] P. Batista, C. Silvestre, and P. Oliveira. On the observability of linear motion quantities in navigation systems. Systems & Control Letters, 60(2):101 – 110, 2011.
[4] P. Batista, C. Silvestre, P. Oliveira, and B. Cardeira. Accelerometer calibration and dynamic bias and gravity estimation: Analysis, design, and experimental evaluation. Control Systems Technology, IEEE Transactions on, PP(99):1 –10, 2010.
[5] S. Brás, R. Cunha, J. F. Vasconcelos, C. Silvestre, and P. Oliveira. Nonlinear attitude estimation using active vision and inertial measurements. In Decision and Control, 2009 held jointly with the 2009 28th Chinese Control Conference. CDC/CCC 2009. Proceedings of the 48th IEEE Conference on, pages 6496 –6501, dec. 2009.
[6] S. Brás, J. F. Vasconcelos, C. Silvestre, and P. Oliveira. Pose observers for unmanned air vehicles. In Proceedings of the 2009 European Control Conference, 2009.
[7] D. Cabecinhas, R. Cunha, and C. Silvestre. Rotorcraft path following control for extended flight envelope coverage. In Decision and Control, 2009 held jointly with the 2009 28th Chinese Control Conference. CDC/CCC 2009. Proceedings of the 48th IEEE Conference on, pages 3460 –3465, dec. 2009.
[8] D. Cabecinhas, R. Naldi, L. Marconi, C. Silvestre, and R. Cunha. Robust take-off and landing for a quadrotor vehicle. In Robotics and Automation (ICRA), 2010 IEEE International Conference on, pages 1630 –1635, may 2010.
[9] D. Cabecinhas, C. Silvestre, and R. Cunha. Vision-based quadrotor stabilization using a pan and tilt camera. In Decision and Control (CDC), 2010 49th IEEE Conference on, pages 1644 –1649, dec. 2010.
[10] R. Cunha, D. Cabecinhas, and C. Silvestre. Nonlinear trajectory tracking control of a quadrotor vehicle. In Proceedings of the 2009 European Control Conference, 2009.
[11] R. Cunha, C. Silvestre, and J. Hespanha. Output-feedback control for stabilization on SE(3). Systems & Control Letters, 57(12):1013 – 1022, 2008.
[12] R. Cunha, C. Silvestre, J. Hespanha, and A. P. Aguiar. Vision-based control for rigid body stabilization. Automatica, 47(5):1020 – 1027, 2011.
[13] B. J. Guerreiro, C. Silvestre, R. Cunha, C. Cao, and N. Hovakimyan. L1 adaptive control for autonomous rotorcraft. In American Control Conference, 2009. ACC ’09., pages 3250–3255, june 2009.
[14] B. J. Guerreiro, C. Silvestre, and P. Oliveira. Automatic LADAR Calibration Methods using Geometric Optimization. In Proceedings of the 2011 IEEE International Conference on Robotics and Automation, May 2011.
[15] J. F. Vasconcelos, R. Cunha, C. Silvestre, and P. Oliveira. Stability of a nonlinear attitude observer on SO(3) with nonideal angular velocity measurements. In Proceedings of the 2009 European Control Conference, 2009.
[16] J. F. Vasconcelos, R. Cunha, C. Silvestre, and P. Oliveira. A nonlinear position and attitude observer on SE(3) using landmark measurements. Systems & Control Letters, 59(3-4):155 – 166, 2010.
[17] J. F. Vasconcelos, G. Elkaim, C. Silvestre, P. Oliveira, and B. Cardeira. Geometric approach to strapdown magnetometer calibration in sensor frame. Aerospace and Electronic Systems, IEEE Transactions on, 47(2):1293 –1306, April 2011.
[18] J. F. Vasconcelos, A. Rantzer, C. Silvestre, and P. Oliveira. Combination of lyapunov functions and density functions for stability of rotational motion. In Decision and Control, 2009 held jointly with the 2009 28th Chinese Control Conference. CDC/CCC 2009. Proceedings of the 48th IEEE Conference on, pages 5941 –5946, dec. 2009.
[19] J. F. Vasconcelos, C. Silvestre, P. Oliveira, and B. Guerreiro. Embedded uav model and laser aiding techniques for inertial navigation systems. Control Engineering Practice, 18(3):262 – 278, 2010.
[20] P. Serra, F. Le Bras, T. Hamel, C. Silvestre, and R. Cunha. Nonlinear IBVS Controller for the Flare Maneuver of Fixed-wing Aircraft using Optical Flow. In Decision and Control (CDC), 2010 49th IEEE Conference on, pages 1656–1661, 2010.
[21] P. Santos. Sensor Based Control of a Quadrotor. Master’s thesis, Instituto Superior Técnico, Universidade Técnica de Lisboa, October 2011.
[22] A. Silva. Vision-based Pose Computation from Landmarks: an application to Quadrotors. Master’s thesis, Instituto Superior Técnico, Universidade Técnica de Lisboa, October 2011.
[23] P. Batista, C. Silvestre, P. Oliveira, and B. Cardeira. Accelerometer Calibration and Dynamic Bias and Gravity Estimation: Analysis, Design, and Experimental Evaluation. IEEE Transactions on Control Systems Technology, 19(5):1128 – 1137, 2011.
[24] Pedro Serra, Rita Cunha, Carlos Silvestre, and Tarek Hamel. Visual Servo Aircraft Control for Tracking Parallel Curves. In Decision and Control (CDC), 2012 IEEE 51st Annual Conference on, pages 1148–1153, 2012.
[25] D. Cabecinhas, R. Naldi, L. Marconi, C. Silvestre, and R. Cunha. Robust take-off for a quadrotor vehicle. IEEE Transactions on Robotics, 28(3):734–742, 2012.
[26] B. J. Guerreiro, P. Batista, C. Silvestre, and P. Oliveira. Sensor-based Simultaneous Localization and Mapping – Part I: GAS Robocentric Filter. In American Control Conference (ACC), 2012, pages 6352 –6357, June 2012.
[27] B. J. Guerreiro, P. Batista, C. Silvestre, and P. Oliveira. Sensor-based Simultaneous Localization and Mapping – Part II: Online Inertial Map and Trajectory Estimation. In American Control Conference (ACC), 2012, pages 6334 –6339, June
2012.
[28] B. J. Guerreiro, C. Silvestre, and R. Cunha. Terrain Avoidance Nonlinear Model Predictive Control for Autonomous Rotorcraft. Journal of Intelligent & Robotic Systems, 69(1):69 –85, 2012.
[29] P. Casau, D. Cabecinhas, and C. Silvestre. Hybrid control strategy for the autonomous transition flight of a fixed-wing aircraft. Control Systems Technology, IEEE Transactions on, 2013.
[30] S. Brás, C. Silvestre, and P. Oliveira. Global Attitude and Gyro Bias Estimation Based on Set-Valued Observers. Systems and Control Letters, 2013. In press.
[31] B. J. Guerreiro, P. Batista, C. Silvestre, and P. Oliveira. Globally Asymptotically Stable Sensor-based SLAM with Online Inertial Map and Trajectory Estimation. IEEE Transactions on Robotics, 2013.
[32] Pedro Santos. Sensor Based Control of a Quadrotor. Master’s thesis, Instituto Superior Tecnico, Universidade Tecnica de Lisboa, October 2011.
[33] Andre Silva. Vision-based Pose Computation from Landmarks: an application to Quadrotors. Master’s thesis, Instituto Superior Tecnico, Universidade Tecnica de Lisboa, October, 2011.
[34] B. J. Guerreiro, Sensor-based Control and Localization of Autonomous Systems in Unknown Environments, Ph. D. Thesis, Instituto Superior Técnico, University of Lisbon, Portugal. 2013.
Voltar ao Início