Linear and Nonlinear State-Space Control Theory
José Gaspar
The default location for this webpage is:
http://users.isr.ist.utl.pt/~jag/course_utils/cee/extras/ssc_optimal_control_links.htm
The slides and the problems here referred are
from the
Classes
by Professor João Miranda Lemos 2016/2017
More references:
Chapter 11, "Optimal Control", of the book "Introduction to Dynamic
Systems: Theory, Models, and Applications", David G. Luenberger,
Wiley 1979
Files in Fenix:
PrCEE-AulasPraticas_Eng_p1-p16.pdf – two problems, P15 and P16, to discuss in the
practical classes
PrContrOpt.pdf
– 16 exercise problems for self-study (Portuguese)
CEE-SolucoesProbSeleccionadosContrOptimo.pdf – solutions for various self-study problems
---- Slides in Portuguese (see later an English
translation)
![]()
![]()
---- English translation:
---- Extra information for problems P15 and P16 of the
practical classes:
See simulation of P15 in
http://users.isr.ist.utl.pt/~jag/course_utils/cee/ssc_problems_extra_notes.htm
See solution of P16 in
http://users.isr.ist.utl.pt/~jag/course_utils/cee/class7/p16_tst.m
function
p16_tst
% May16, JG
% system G(s)=1/s^2:
A=
[0 1; 0 0];
B=
[0 1]';
C=
[1 0];
D=
0;
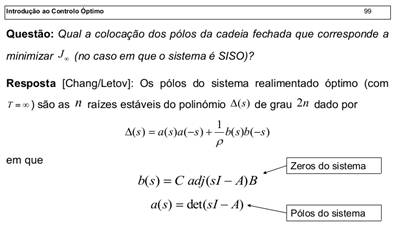
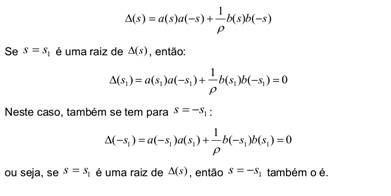
% method 1: pole placement as suggested by Chang-Letov's theorem
sp=
2*exp(j*pi*5/4); % pole value computed in the class
K=
acker( A, B, [sp conj(sp)])
% method 1b: pole placement as suggested by Chang-Letov's theorem
sp=
roots([1 0 0 0 16]); sp= sp( real(sp)<0 );
K=
acker(A, B, sp )
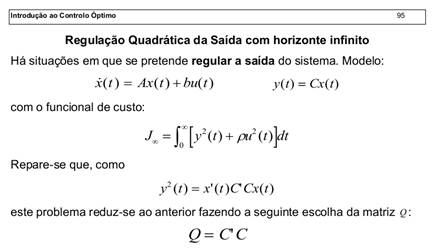
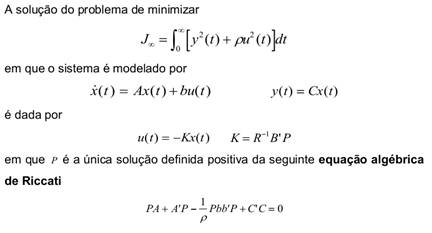
% method 2: formulation as a Linear Quadratic Regulator (LQR):
Q=
C'*C;
R=
1/16;
K=
lqr( A, B, Q, R)
% LQR implies closed loop stability. See it in the poles:
eig(A
- B*K)
---- Table of expressions extracted from the
collection of self-study problems:
Files to download from Fenix:
PrContrOpt.pdf – 16 exercise problems for
self-study (Portuguese)
CEE-SolucoesProbSeleccionadosContrOptimo.pdf – solutions for various self-study
problems
|
Problem number |
System and initial conditions |
Merit or Cost function (J) |
Bounded or Unbounded control |
|
P1 |
|
|
|
|
P2 |
|
|
|
|
P3 |
|
|
|
|
P4 |
x(0)=10, x(T)=20, T=1 |
|
|
|
P5 |
|
|
|
|
P6 |
|
|
|
|
P7 |
|
|
|
|
P8 |
|
|
|
|
P9 |
|
|
|
|
P10 |
|
|
|
|
P11 |
|
|
|
|
P12 |
|
|
|