Publications
|
|
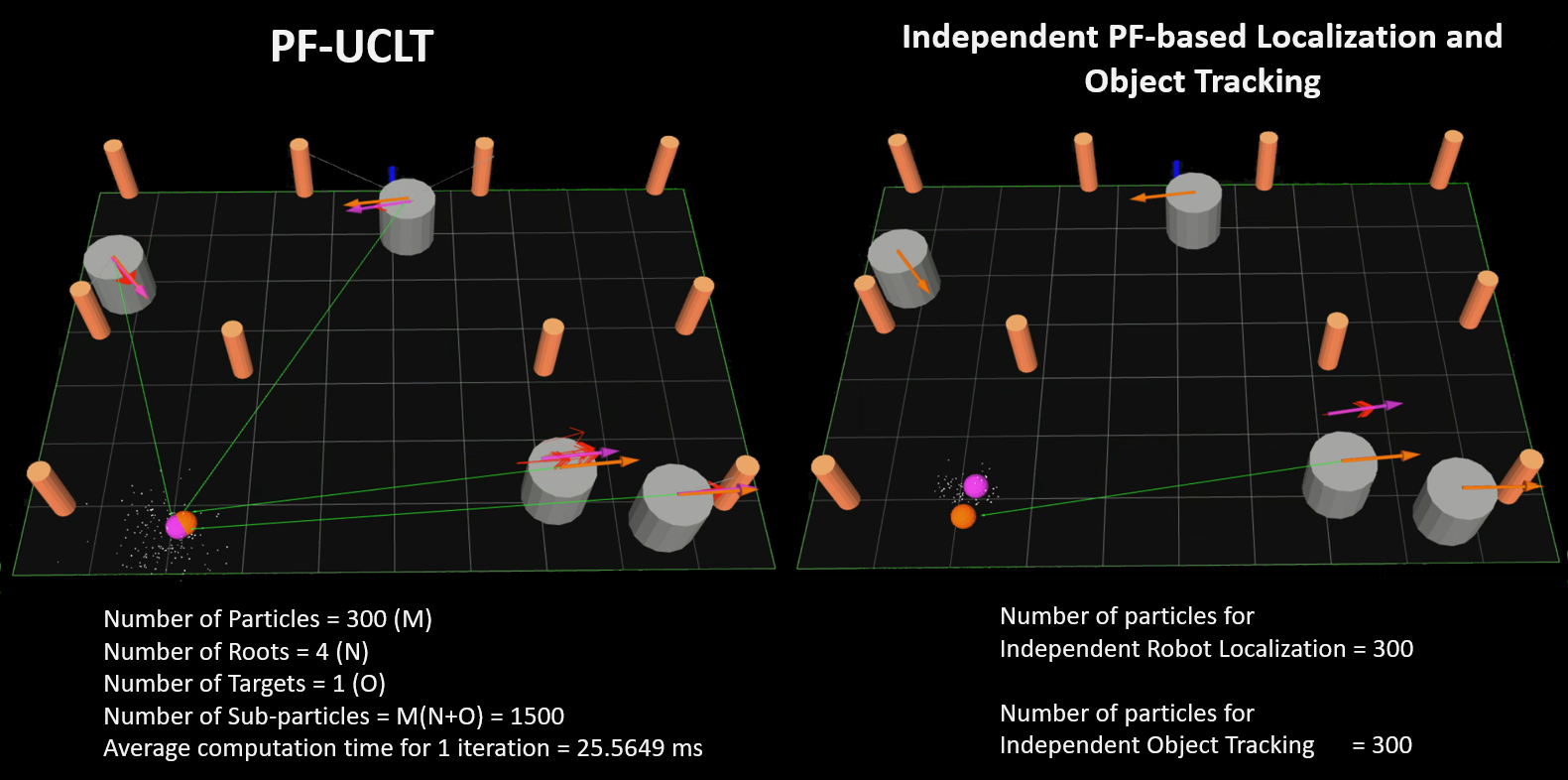
A. Ahmad, G. Lawless, P. Lima. An Online Scalable Approach to Unified Multirobot Cooperative Localization and Object Tracking. IEEE Transactions on Robotics, vol.PP, no.99, pp.1-16 URL. Also in proceedings of IEEE International Conference on Robotics and Automation (ICRA) 2018, Journal Track., May 2018. |
|
|
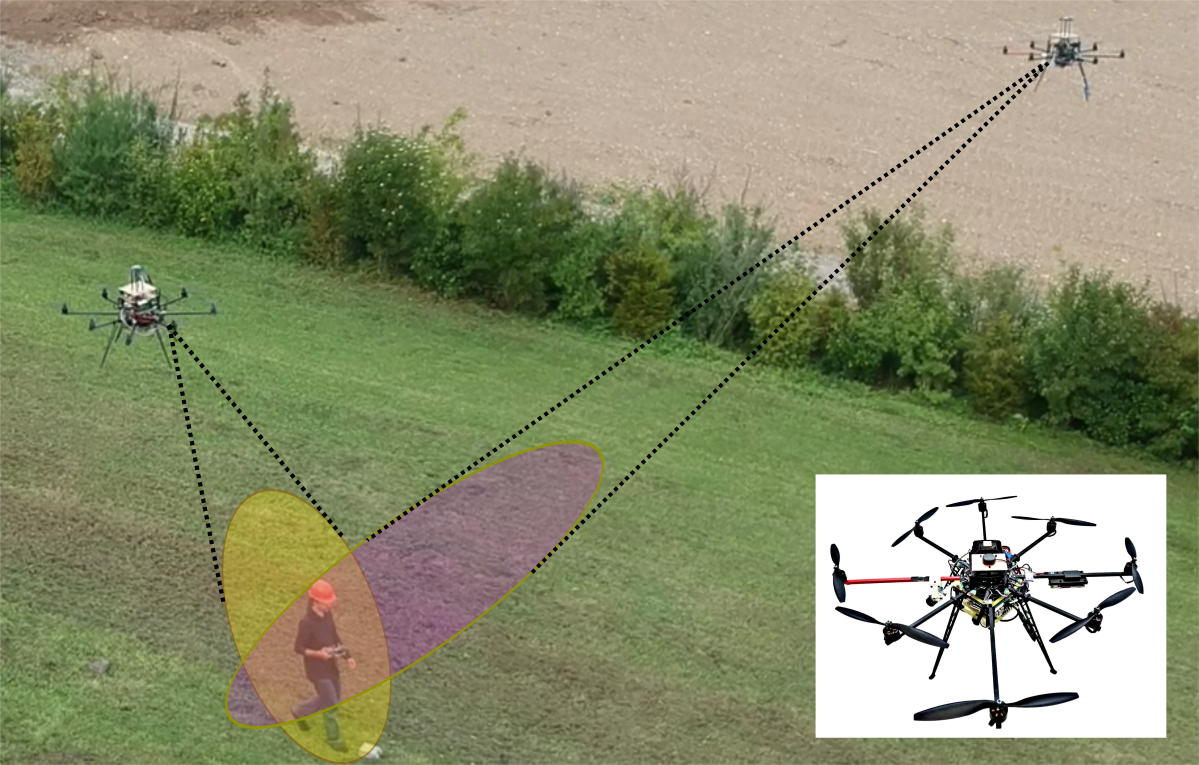
E. Price, G. Lawless, R. Ludwig, I. Martinovic, H. Bülthoff, M. Black, A. Ahmad. Deep Neural Network-based Cooperative Visual Tracking through Multiple Micro Aerial Vehicles. IEEE Robotics and Automation Letters, vol. 3, no. 4, pp. 3193-3200, Oct. 2018. URL. |