This experiment is very similar to the one-plane closed-loop tracking.
The camera moves with constant velocity during the first 15 time steps and is still during the remaining time.
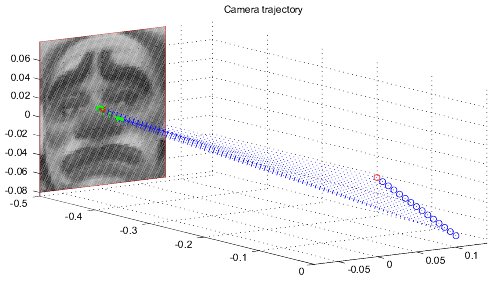
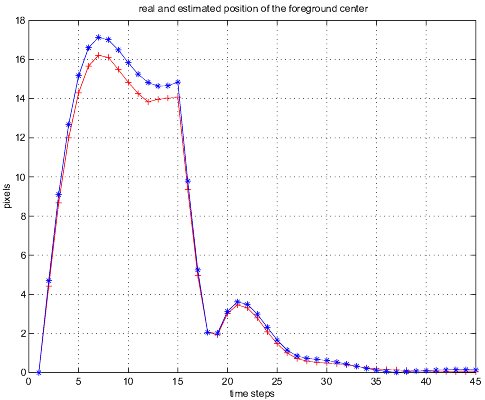
Plot of estimated and true target positions
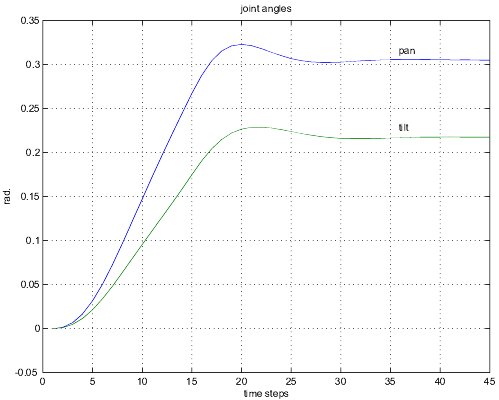
Plot of pan and tilt angles along time
In this experiment we used a foreground object with scale 25% area scale - check this page to see what it means. We tested the same trajectory with the cartesian version of the algorithm. However for objects less than 42.25% area scale, it was not able to perform tracking. Therefore we made a simulation with an object of 42.25% size. You can check here the results for this case: closed-loop tracking experiment using cartesian images.
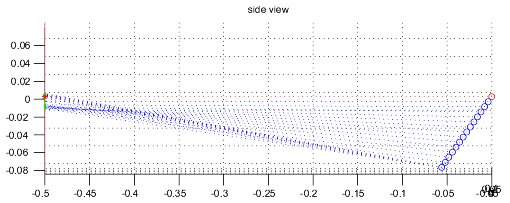
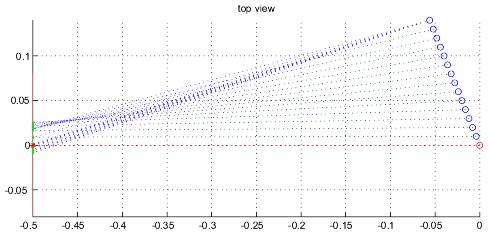
The real and estimated positions of the target:
The pan and tilt angles along time: