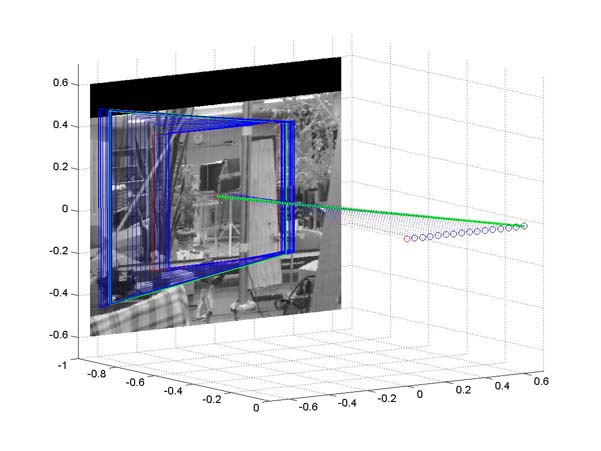
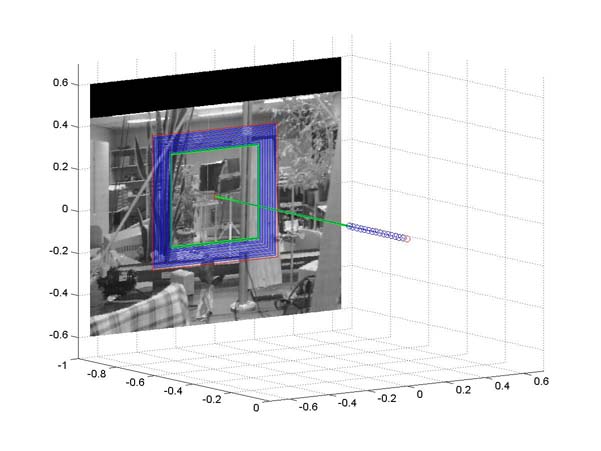
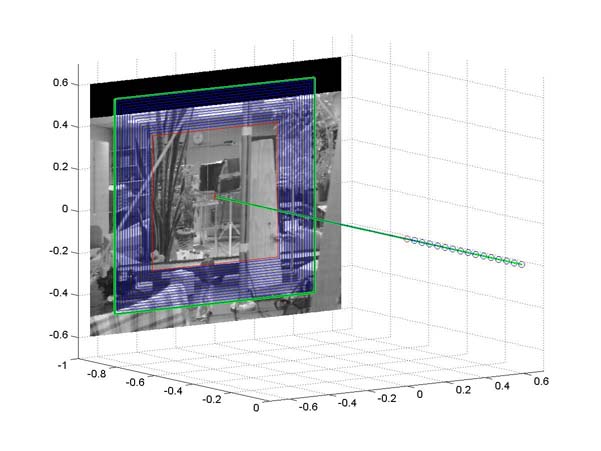
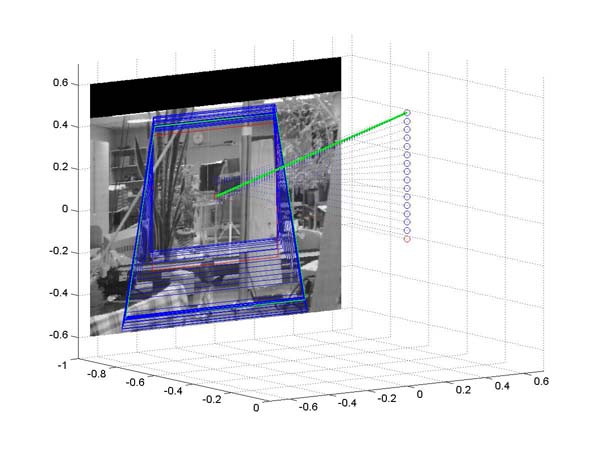
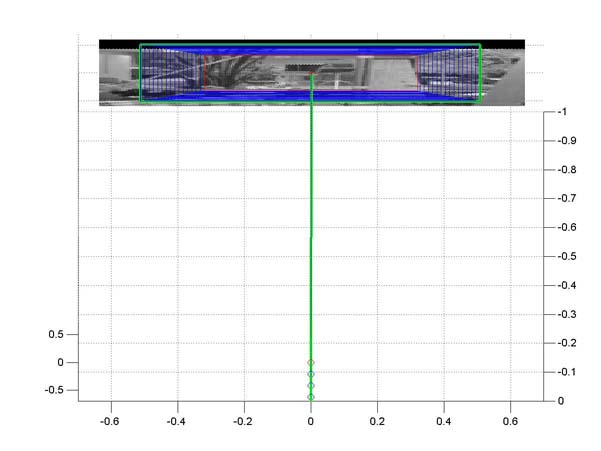
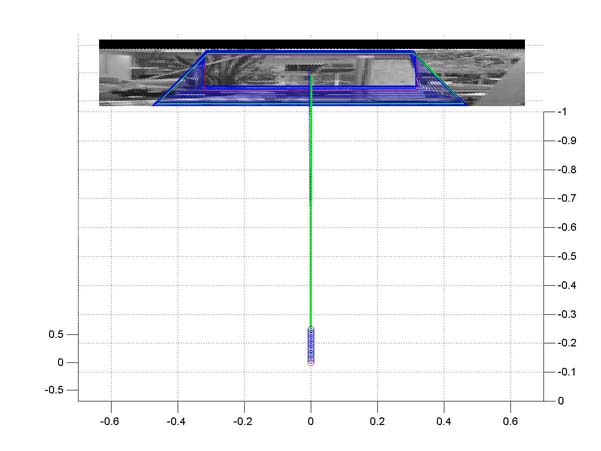
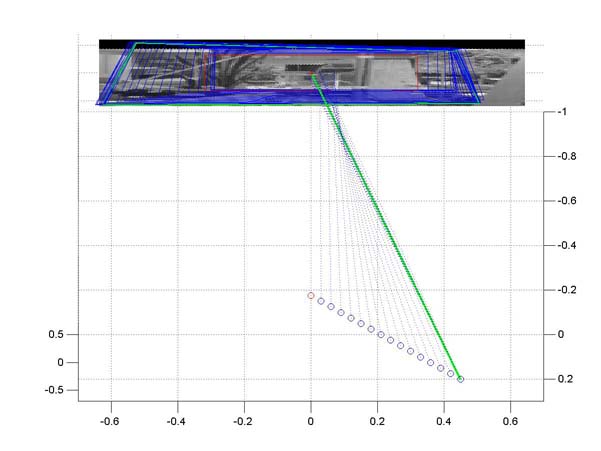
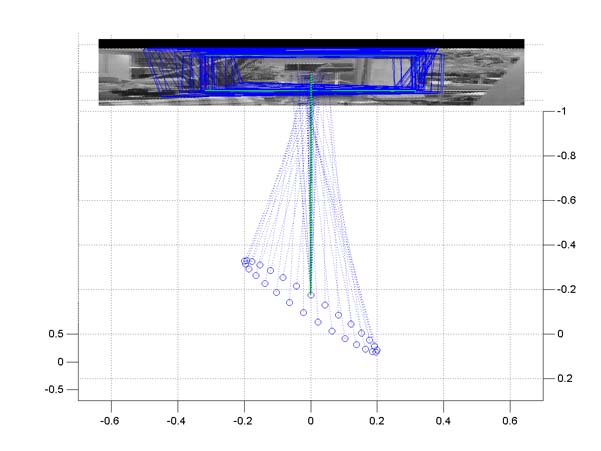
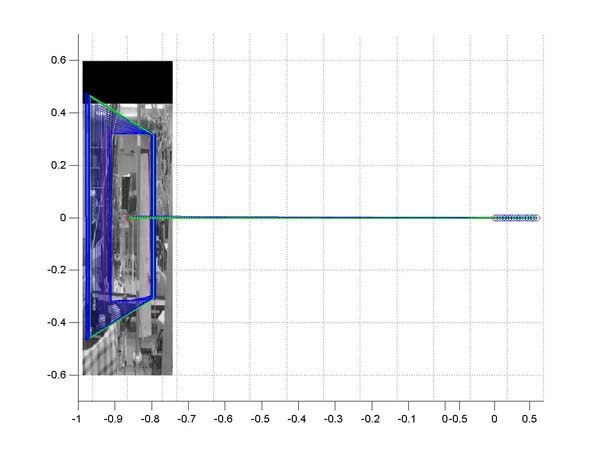
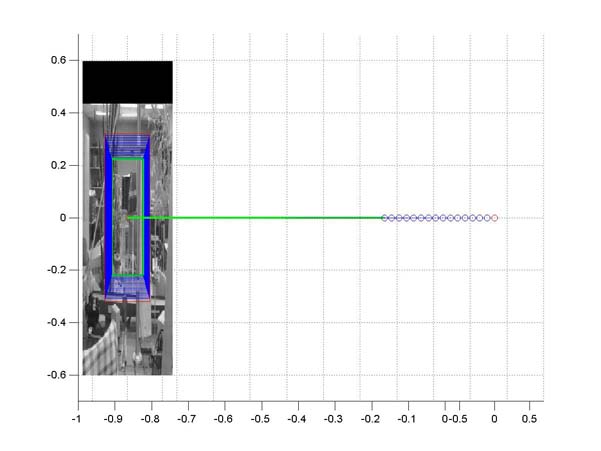
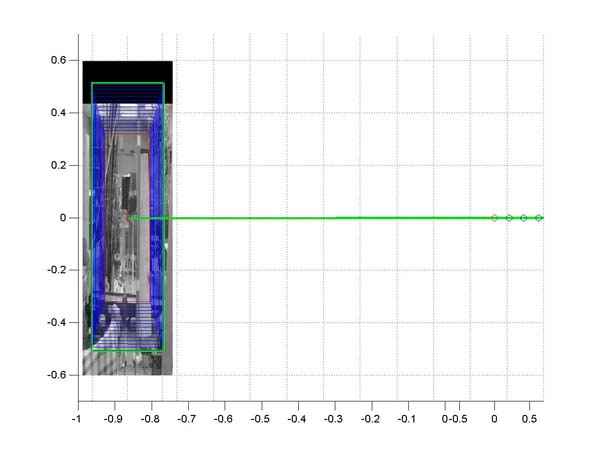
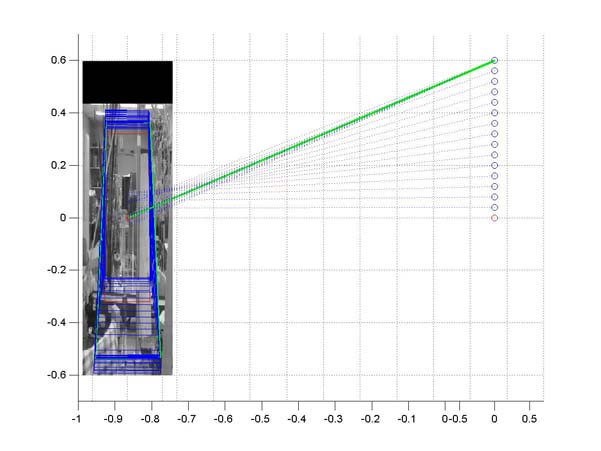
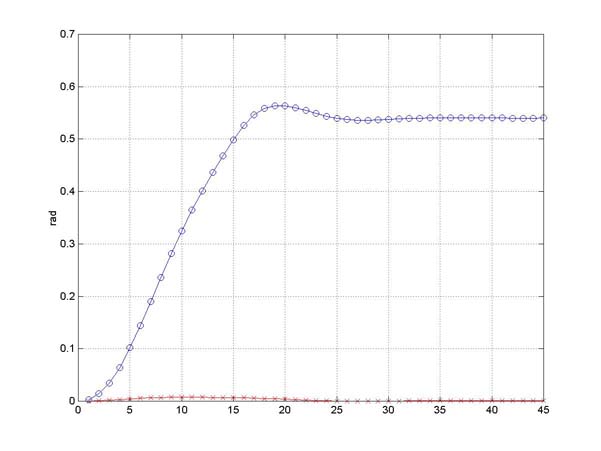
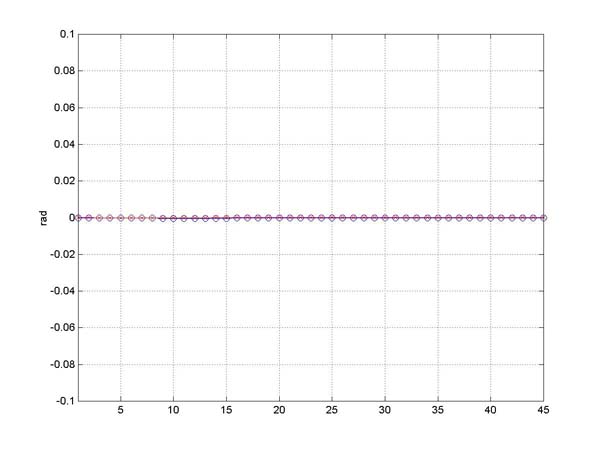
In these experiments I can control the pan and tilt degrees of freedom of my virtual camera. After a forced translation of the camera (for instance, it is placed on top of a moving robot) I want to control the orientation of camera in order to track the central point of the template. I defined a simple second order dynamic model for the pan/tilt motion and control these joints using simple proportional controllers. Therefore the control is not "one step" but instead has a lag that depends on the velocity of the camera and the dynamical parameters of the pan/tilt joints.
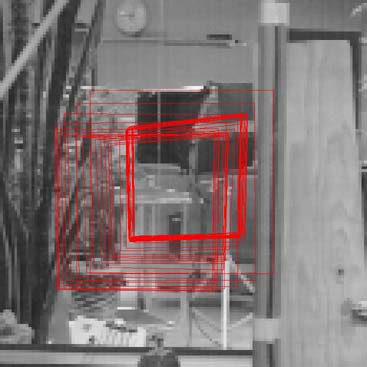
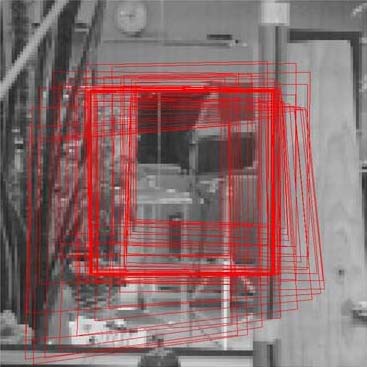
In these experiments the displacement of the camera can be larger than in the open-loop experiments because the gaze is controlled in order to have the template almost always in the field of view.
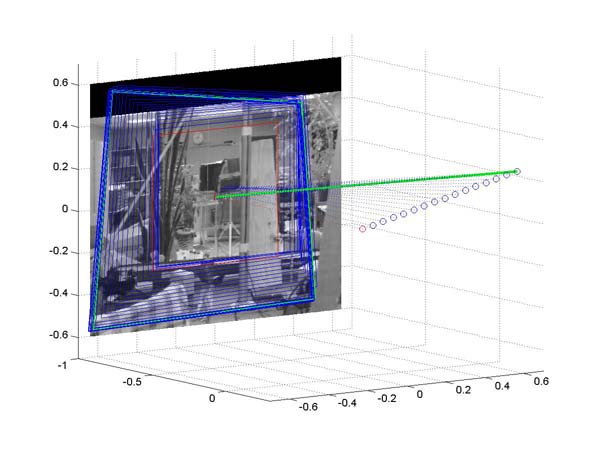
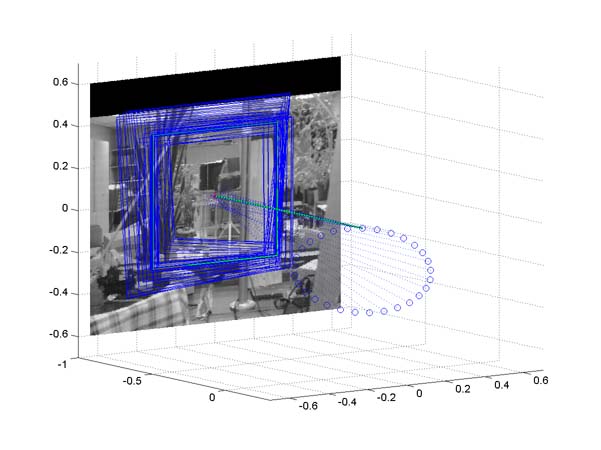
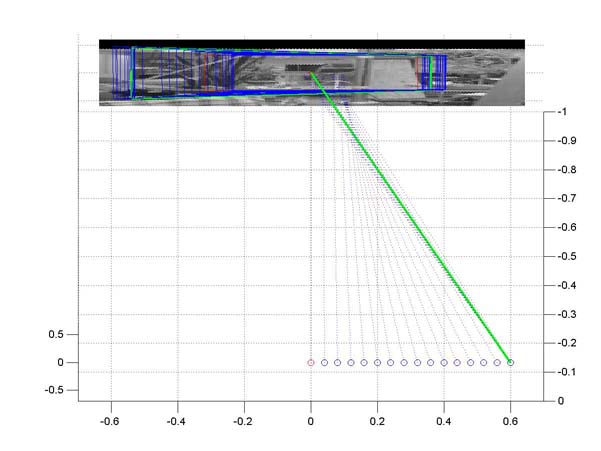
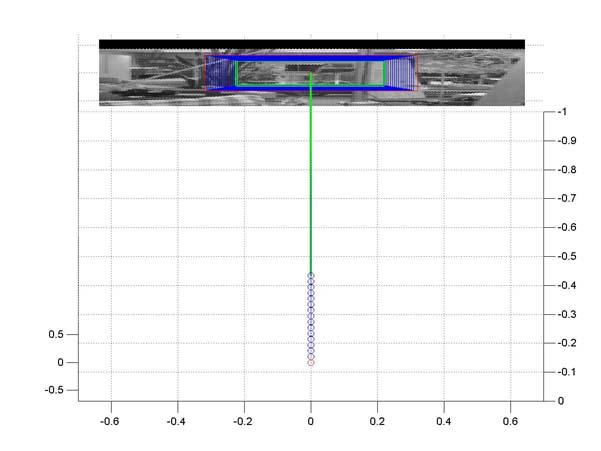
| Horiz. transl. | Zoom in | Zoom out | Vert. transl. | Diag. transl. | Eliptic traject. | |
| Traj (3D) | trajcl1.jpg | trajcl2.jpg | trajcl3.jpg | trajcl4.jpg | trajcl5.jpg | trajcl6.jpg |
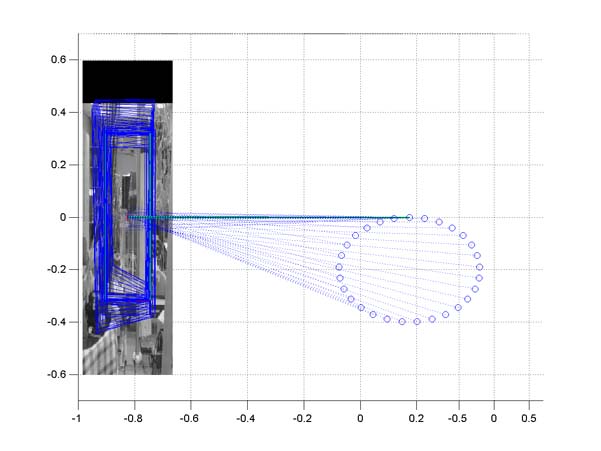
| Traj (top) | trajcl1top.jpg | trajcl2top.jpg | trajcl3top.jpg | trajcl4top.jpg | trajcl5top.jpg | trajcl6top.jpg |
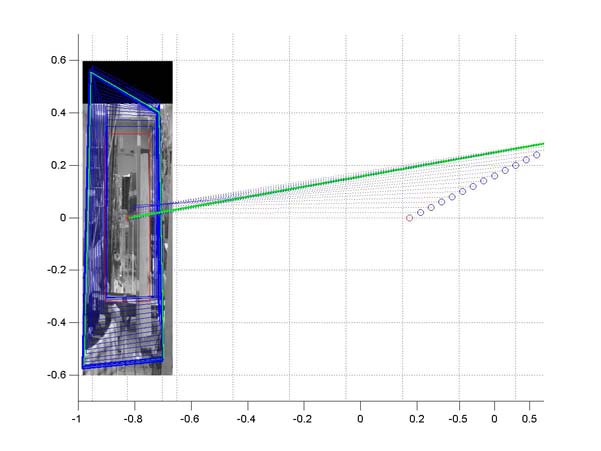
| Traj (side) | trajcl1side.jpg | trajcl2side.jpg | trajcl3side.jpg | trajcl4side.jpg | trajcl5side.jpg | trajcl6side.jpg |
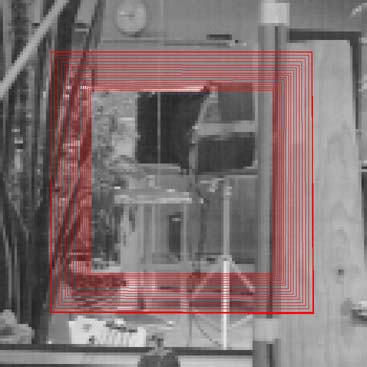
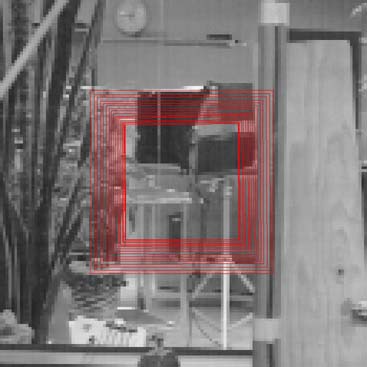
| Tracked Window | clalla.jpg | clallb.jpg | clallc.jpg | clalld.jpg | clalle.jpg | clallf.jpg |
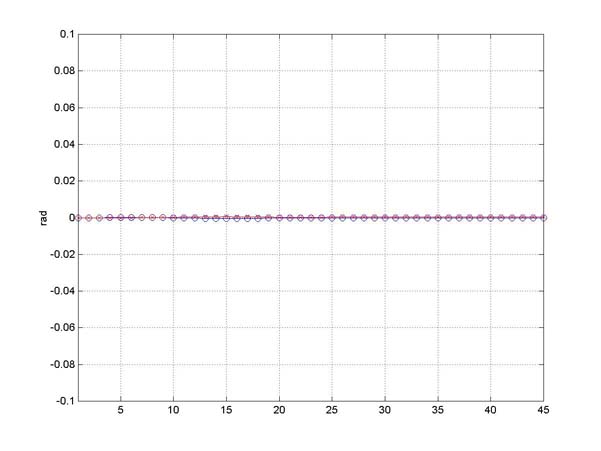
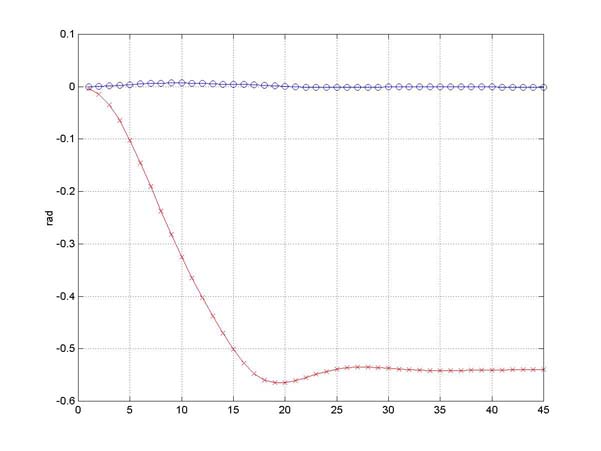
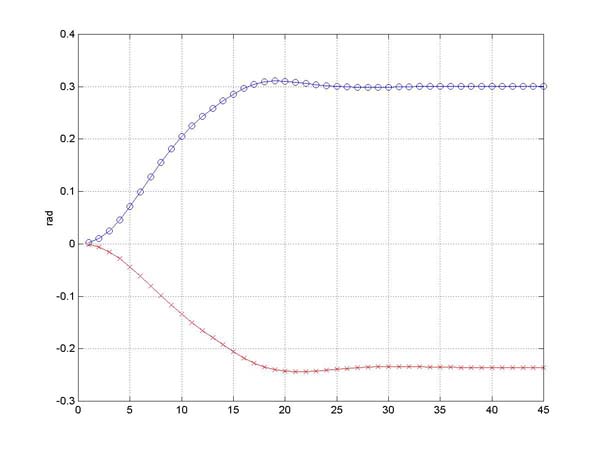
| Pan/Tilt | jointa.jpg | jointb.jpg | jointc.jpg | jointd.jpg | jointe.jpg | jointf.jpg |
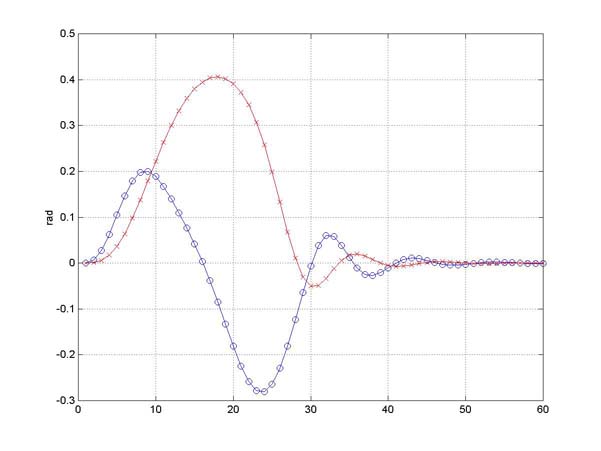
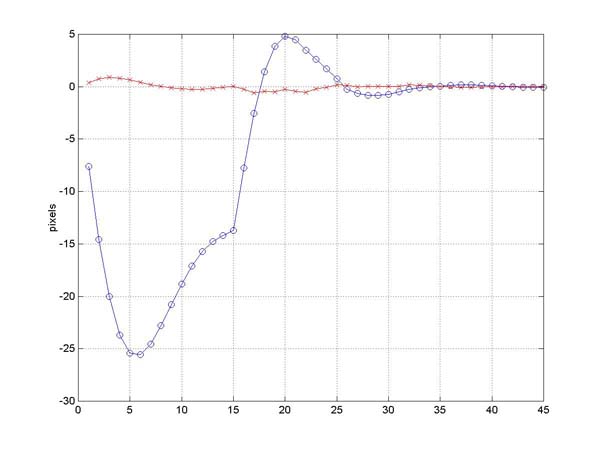
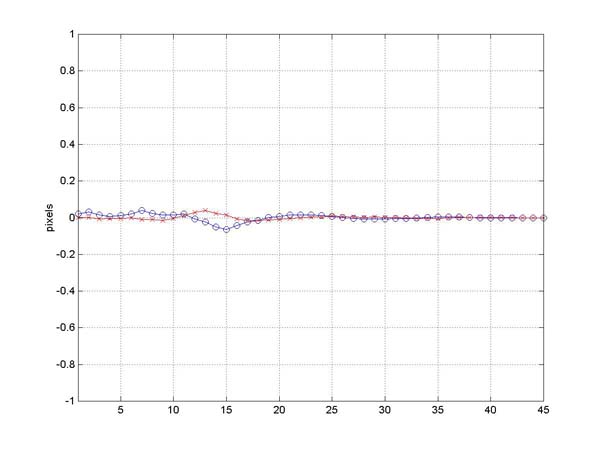
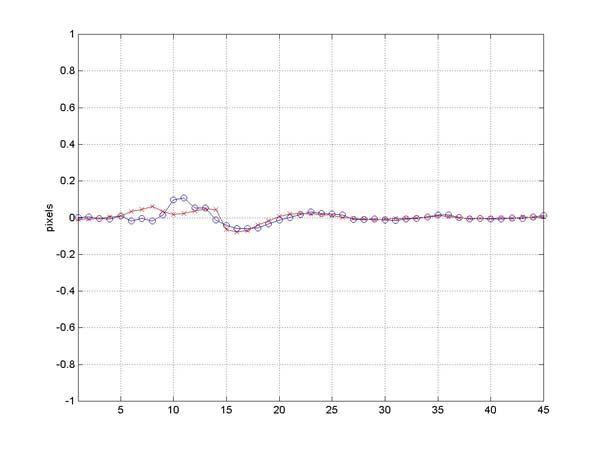
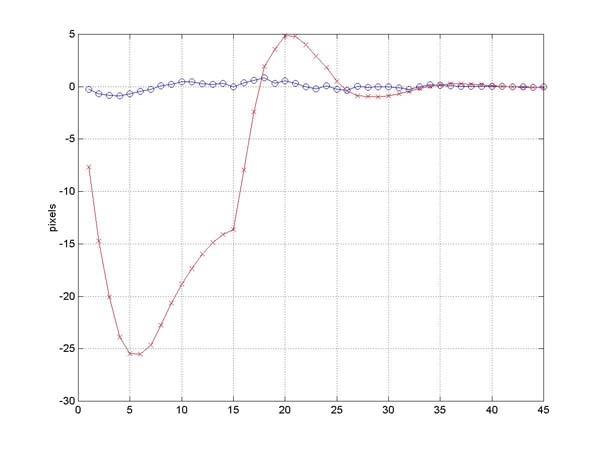
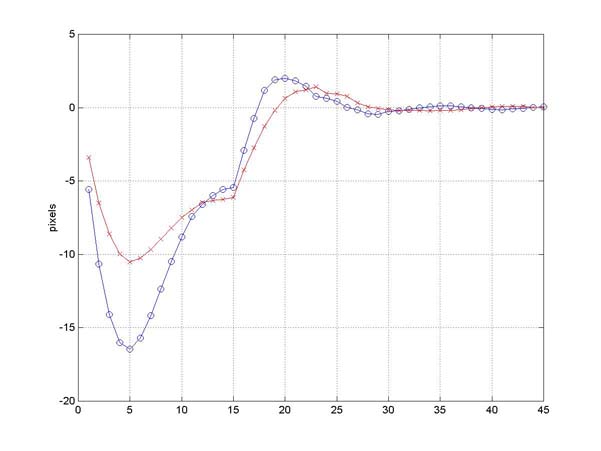
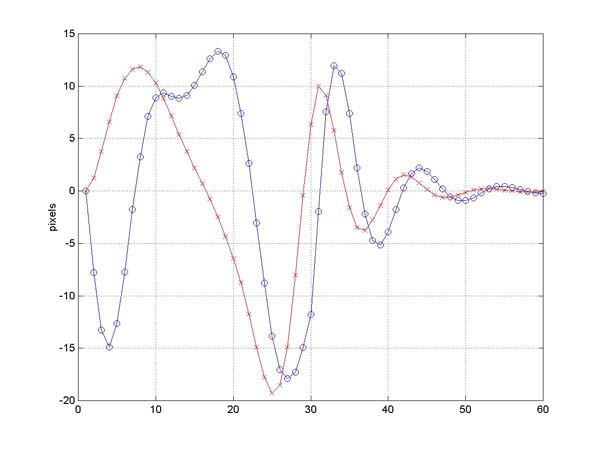
| Image error | coorda.jpg | coordb.jpg | coordc.jpg | coordd.jpg | coorde.jpg | coordf.jpg |
| Video Cart. | clcarta.avi | clcartb.avi | clcartc.avi | clcartd.avi | clcarte.avi | clcartf.avi |
| Video Log. | clloga.avi | cllogb.avi | cllogc.avi | cllogd.avi | clloge.avi | cllogf.avi |
| Video Regist. | clwarpeda.avi | clwarpedb.avi | clwarpedc.avi | clwarpedd.avi | clwarpede.avi | clwarpedf.avi |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}