Image from
[Galego14].
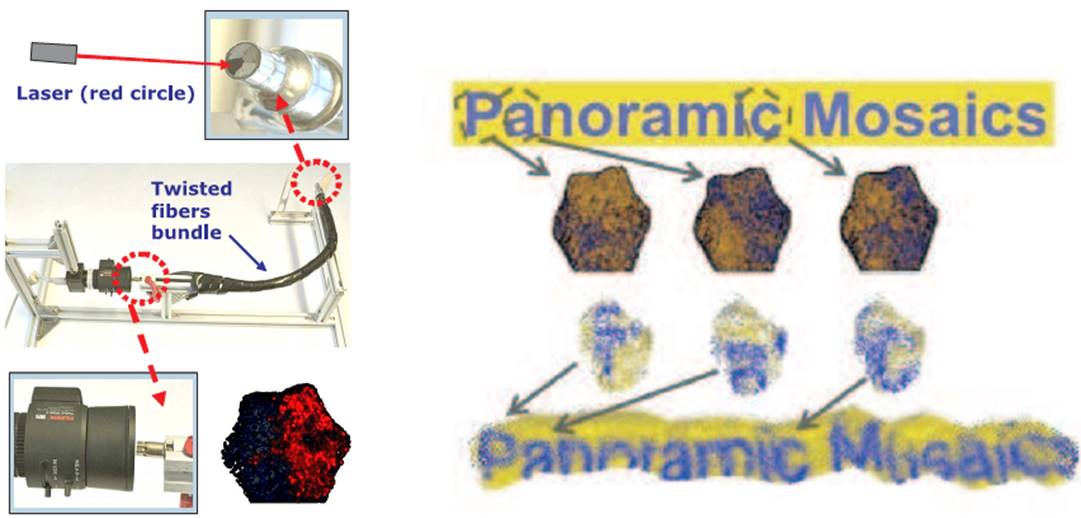
Imaging with
Moving Bundles of Optic-fibers
-- Project description at Fenix:
Objectives:
A fiberscope carries
imaging through a bundle of optic fibers. In a simple description, one may say
that each optic fiber transports "one pixel". Pointing the
optic-fiber bundle (cable) according to multiple azimuth and elevation angles
allows obtaining multiples images which can be fused to form a panoramic image.
The work is to
be carried on an existing fiberscope based in a standard video camera and a cable of optic
fibers. The opposite to the camera end of the flexible
optic-fibers-cable is mounted on top of a pan-tilt-basis.
The main
objectives of the work are the following:
- calibrating
the fiberscope in order to obtain images readable by humans,
- obtaining
panoramic images by fusing multiple (narrow field) images.
Requirements (grades, required courses, etc):
-
Place for
conducting the work-proposal:
ISR / IST
Observations:
This work has
its motivation in recent research which has show that under certain conditions a
cross-cut cable of a fiberscope can be reconnected. The disarrangement of the
various fiber tips can be estimated by image processing methodologies. The work
is originally inspired by the, still distant, biological goal of reconnecting
damaged optic nerves.
Previous works
conducted at ISR/IST provide good starting points for the thesis. In particular
a number of hardware prototypes already exist, together with a number of
datasets.
-- Links to works at ISR / IST:
Journal papers,
conference papers and dissertations:
"DCCAL:
Discrete Cameras Calibration using Properties of Natural Scenes",
2010-2013, FCT PTDC/EEA-CRO/105413/2008. Project
webpage.
"Discrete
camera calibration from pixel streams", Etienne Grossmann, José António
Gaspar and Francesco Orabona, Computer Vision and
Image Understanding (Special issue on Omnidirectional Vision, Camera Networks
and Non-conventional Cameras), Volume 114, Issue 2, Pages 198-209, February 2010.
PDF
file.
"Topological
Auto-Calibration of Central Imaging Sensors", R. Galego, R. Ferreira, A.
Bernardino, E. Grossmann and J. Gaspar, IbPRIA 2013. PDF
file.
"Discrete
Camera Autocalibration Consistent with the Frame of the Robotic Pan-Tilt
Basis", R. Galego, R. Ferreira, A. Bernardino, E. Grossmann, J. Gaspar,
Procedia Technology 17, 186-193, 2014 Elsevier. PDF
file.
"Imaging
Based on Optic-fiber Bundles: Topological and Geometric Calibration", João Silva,
MSc Thesis, Electrical and Computer Engineering, IST - 2017/2018. More
information.
-- More information:
Motivation:
Fiberscopes are
imaging devices where the images are acquired in one end of a thin and flexible
cable of optic fibers, transmitted through the cable to the other end, and
finally magnified with an eyepiece. Commercial fiberscopes are based in cables
where the fibers are arranged to form a regular grid. Breaking the cable of a
fiberscope has traditionally rendered useless the device, as soldering tens of
thousands of fibers, without known correspondences and confined in a small
diameter (1 to 5 mm), is not a human feasible task.
Recent
research, biologically inspired by the remote goal of reconnecting broken optic
nerves, has show that under certain conditions the broken cable of a fiberscope
can still be used. The disarrangement of the various fiber tips can be
estimated by modeling
the collection of fiber tips as a discrete camera, and then determining the
topology of the discrete camera. Discrete cameras are defined as collections of
pixels, photocells, organized as pencils of lines with unknown topologies. One
may present to the camera a known pattern, moving with known speed and
direction, and therefore estimate progressively the topology. Alternatively,
discrete cameras which can be moved freely can be calibrated from natural
scenes [Grossmann10].
This MSc
project focuses on calibrating a discrete camera. The result is similar to a
fiberscope but built from a much lesser expensive bundle of twisted
optic-fibers. Given the calibrated discrete camera, then panoramic images can
be obtained by fusing multiple (narrow field) images.
Detailed description:
Conventional
video cameras are built from CCD or CMOS sensors whose pixels are organized in
rectangular grids. Determining the intrinsic parameters of a mobile camera
without any assumptions about the imaged world is called camera self- or
auto-calibration. More commonly, cameras are static and one shows them a planar
structured (chess) calibration pattern in various poses, which is enough to
perform the calibration [Bouguet-WWW].
Discrete
cameras simply combine pixels in a fixed manner but without a specific
arrangement. Discrete cameras are interesting for robotic applications due to
allowing designs specific to the tasks at hand [Neumann05], but pose a
challenge right from the calibration point. Recent research work has shown that
discrete cameras, which can be moved freely and have a central arrangement of
the pixels, can be calibrated from natural scenes [Grossmann10, Galego13,
Galego14].
The camera to
be used in the dissertation work is based on a standard camera and a standard
lens. In between the camera and the lens one has a
collection of optical fibbers, rigidly glued to each other at both ends of the
cable [Neumann05].
This MSc
project focuses on calibrating a discrete camera. A number of
calibration methodologies are available for discrete cameras. The main idea is
that neighbor photocells view approximately the same direction of the world and
thus have higher correlations of their time-signal readings (pixel streams). As
distinct from many conventional calibration methods in use today, calibrating
discrete cameras requires moving them within a diversified (textured) natural
world.
The main steps
of the work are the following:
- calibrating
the camera in order to obtain images readable by humans, by using auxiliary
patterns and/or light or laser pointing
- (alternative)
calibration based in using the camera motion on textured scenes
- obtaining panoramic images
by fusing multiple (narrow field) images
References:
[Bouguet-WWW] Jean-Yves Bouguet,
"Camera calibration toolbox for matlab", http://www.vision.caltech.edu/bouguetj/calib_doc/
[Hassanpour04]
Camera auto-calibration using a sequence of 2D images with small rotations,
Reza Hassanpour, Volkan Atalay,
Pattern Recognition Letters, Vol.25, Issue 9, 2 July 2004, Pages 989-997
[Agapito01]
Agapito, L., Hayman, E., Reid, I.D., 2001. Self
calibration of rotating and zooming cameras.
Int. J. Comput. Vision 45(2), 107–127.
[Neumann05]
"Compound Eye Sensor for 3D Ego Motion Estimation", Jan Neumann,
Cornelia Fermuller, Yiannis Aloimonos,
Vladimir Brajovic, IROS 2005, see also
http://citeseerx.ist.psu.edu/viewdoc/summary?doi=10.1.1.147.929
[Grossmann10]
"Discrete camera calibration from pixel streams", Etienne Grossmann,
José António Gaspar and Francesco Orabona, Computer
Vision and Image Understanding (Special issue on Omnidirectional Vision, Camera
Networks and Non-conventional Cameras), Volume 114, Issue 2, Pages 198-209,
February 2010.
[Galego13]
"Topological Auto-Calibration of Central Imaging Sensors", R. Galego,
R. Ferreira, A. Bernardino, E. Grossmann and J. Gaspar, IbPRIA
2013
[Galego14]
"Discrete Camera Autocalibration Consistent with the Frame of the Robotic
Pan-Tilt Basis", R. Galego, R. Ferreira, A. Bernardino, E. Grossmann, J.
Gaspar, Procedia Technology 17, 186-193, 2014 Elsevier
Expected results:
At the end of
the work, the students will have enriched their experience in computer vision.
In particular are expected to develop and assess:
- optics for imaging
- algorithms for calibrating central cameras.
More MSc dissertation proposals on Computer and Robot Vision in:
http://isr.tecnico.ulisboa.pt/~jag