
Engenharia Electrotécnica e de Computadores
|
Controlo do Pêndulo Invertido
Engenharia Electrotécnica e de Computadores
|
** Notas introdutórias e objectivos **
Introdução
O pêndulo invertido demonstrado na InfoForum, ver figura 1, é composto por uma haste metálica que pode rodar livremente em torno de um eixo assente num carro motorizado. Se a haste não for contrariada pelo movimento do carro, cai ao fim de pouco tempo para um dos lados. É objectivo do controlo mover o carro de modo a manter a haste vertical. O carro também deve poder ser deslocado para qualquer ponto do seu curso, mantendo a haste vertical.

Fig.1: Objectivos: Manter o pêndulo vertical; Mover o carro que suporta o pêndulo.
O pêndulo invertido na acrobacia e no dia a dia
O problema do pêndulo invertido observa-se frequentemente no dia a dia, e naturalmente em acrobacias. O artista acrobata que se movimenta em cima de um monociclo (ver figura 2) equilibra-se movendo o carro de uma única roda que o suporta. No dia a dia, também o empregado de mesa que transporta uma bandeja com garrafas ou copos faz um trabalho de equilíbrio. A própria capacidade que as pessoas têm de se manter na posição vertical tem aspectos semelhantes aos do pêndulo invertido. Em particular nos bebés que ainda estão a aprender a andar, precisam muito cedo de descobrir como movimentar os pés para manter o corpo vertical.
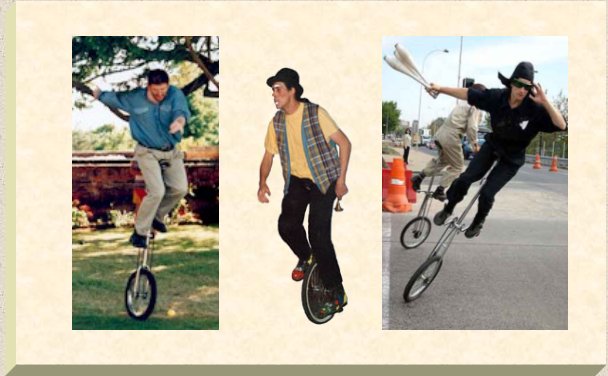
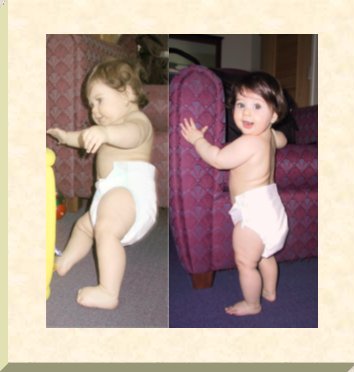
Fig.2: O problema do pêndulo invertido observa-se facilmente por exemplo nos equilibristas, ou nos bebés que estão a aprender a andar.
Controlo electrónico do pêndulo
Tomando por inspiração a habilidade das pessoas para manter vertical, ou seja controlar, o pêndulo invertido, cedo se colocou a pergunta se seria possível o respectivo controlo automático. Esta é uma questão interessante tanto cientificamente como do ponto de vista da engenharia.
Cientificamente é interessante ver que quanto mais o pêndulo se afasta da vertical, maior é a força que o leva a cair para a posição horizontal. A forma de equilibrar o pêndulo deverá portanto passar por mover a base do pêndulo de forma a "antecipar e segurar a queda".
Do ponto de vista da engenharia, pergunta-se como se pode mover a base e qual deve ser o respectivo deslocamento para manter o equilíbrio. Mover a base é fácil, basta colocar um motor eléctrico. A pergunta mais interessante é mesmo: como determinar o deslocamento a realizar? A resposta está na colocação de um SENSOR que mede o ângulo de afastamento em relação à vertical. Dado este ângulo, positivo ou negativo, é possível calcular se o carro que suporta o pêndulo se deve deslocar para a esquerda ou para a direita. Este é o papel do controlador: a partir do ângulo medido com o sensor calcular o deslocamento a realizar na base do pêndulo. Este é aliás sempre o papel do CONTROLADOR: consultar os sensores e comandar precisamente os actuadores (motores).
Na figura 3 mostra-se uma imagem do controlador (electrónico) e indicam-se a medida do ângulo realizada pelo sensor colocado no eixo livre (seta a vermelho) e o sinal calculado pelo controlador para comando do motor (seta azul).
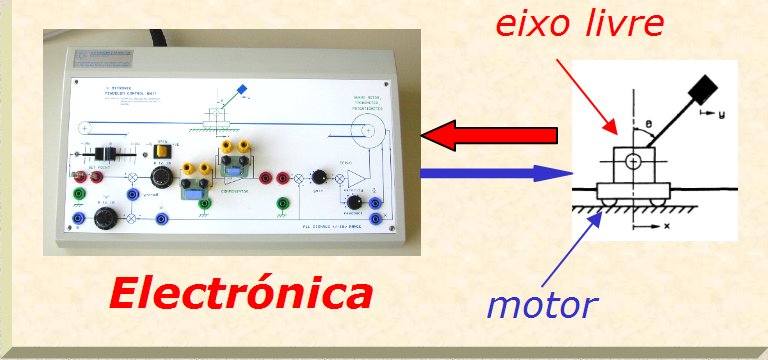
Fig.3: É possível controlar automaticamente o pêndulo invertido montado em cima de um carro motorizado? Sim! Como se faz? Juntar um sensor e um controlador para realizar o equilíbrio. Papel do controlador: dado o ângulo com a vertical medido pelo sensor, calcular o movimento do carro para corrigir o ângulo.
Um último comentário: na descrição que foi feita de controlo, esteve sempre subjacente a utilização de electrónica. A electrónica actualmente aparece naturalmente na construção dos controladores, pois sendo extraordinariamente mais rápida e normalmente mais económica que os sistemas mecânicos (ver por exemplo o histórico "governador" de James Watt), tem também a virtude de ser muito mais versátil.
Engenharia e aplicações do controlo
Uma das razões pela qual o controlo é actualmente estudado em várias licenciaturas em engenharia é a sua utilidade (necessidade!) em muitos dos sistemas construídos pelo homem. Todos os sistemas com movimento ou somente com algumas partes móveis precisam de algum controlo. Mesmo alguns sistemas sem partes (macroscopicamente) móveis, tais como os amplificadores de áudio ou a internet, também precisam de controlo.
O pêndulo invertido é interessante porque mostra alguns fundamentos de controlo de sistemas bem conhecidos. Um exemplo é o lançamento de veículos espaciais (ver figura 4). Os foguetes que levantam os veículos espaciais estão, tal como o carro do pêndulo, na sua base. Os veículos espaciais se não forem correctamente dirigidos na vertical, tal como o pêndulo, caiem para um dos lados.

Fig.4: O veículo espacial precisa de ser guiado na vertical.
Um aplicação muito recente do controlo do pêndulo invertido é a um veículo transportador de pessoas, com duas rodas posicionadas ao lado da pessoa, tal como as quadrigas romanas mas movido por motores eléctricos. Este veículo, ver figura 5, tem o nome Segway e é produzido por uma empresa norte-americana com o mesmo nome. Tal como o pêndulo invertido, o Segway mantém-se automaticamente na posição vertical, por acção da motorização eléctrica controlada electronicamente.

Fig.5: Segway, um veículo transportador de pessoas. É um veículo para o futuro dada a sua versatilidade, reduzida dimensão e facilidade de utilização (a única razão para a aparente falha da fotografia da esquerda é que faltou ligar o botão de power-on).
Nota final
O exemplo do pêndulo invertido é sobretudo motivador para as virtudes do controlo. Outros sistemas tais como a bola em levitação magnética ou o controlo de altura de água num tanque, mostrariam de igual forma o interesse e necessidade do controlo. Aprofundando um pouco mais é possível verificar que os vários sistemas podem ser tratados de forma parecida e que o projecto dos controladores tem estratégias comuns, justificando-se plenamente o seu estudo em várias licenciaturas.
Sem dúvida as várias engenharias, não só a electrotécnica, tiram partido das possibilidades proporcionadas pelo controlo, e atendendo ao constante melhoria da tecnologia certamente cada vez mais irão investir no controlo para produzir sistemas cada vez mais perfeitos, úteis e fáceis de utilizar.
Mais informação
Informação curricular:
Institutos de Investigação (mais ligados à especialização em Sistemas, Decisão e Controlo):
Sites de onde foram extraídos exemplos de engenharia e aplicações do controlo:
Fotografias
Mini galeria de fotografias de projectos realizados no IST/ISR.
Esta página é mantida por J. Gaspar - Email: jag@isr.ist.utl.pt
Última actualização: 20-12-2004