|
|
Research Project
|
 |
|
ROBOT
NAVIGATION, TASK ALLOCATION USING A SENSOR
NETWORK
Technology
> Actuation
> Robot Navigation, Task Allocation using a Sensor
Network
|
|
|
|
|
|
|
|
|
|
OVERVIEW
Robot Navigation and Multi Robot Task
Allocation
Our work is broadly situated at the intersection of
mobile robots and sensor networks. The underlying
principle in interaction between the network and robots
is: the network serves as the communication, sensing and
computation medium for the robots, whereas the robots
provide actuation (mobility), which is used among other
things for network deployment, repair, and other tasks.
In this work we use a new Networked Infomechanical
Systems (NIMS) architecture that combines both static
and mobile sensor nodes. This architecture achieves a
spatiotemporal environment coverage that is dramatically
advanced over that of either system alone. Mobility
allows the networked sensor system to always seek the
spatiotemporal sampling distribution to achieve a
specified fidelity of environmental variable
reconstruction. We demonstrate that mobility permits the
NIMS system to respond to initially unpredictable and
variable environmental evolution. In our work static
sensor nodes are positioned in the volume surrounding a
transect in which the mobile node operates. Every sensor
node is responsible for reporting a phenomenon occurring
in the vicinity. The mobile node then uses simple task
allocation to determine which node has higher priority
and then can utilize sampling algorithms (either raster
or adaptive sampling) to sample only the vicinity of the
node that detected the phenomenon. In our previous work
we experimentally showed the benefits of such a
stratification of the sampling transect. The rapid time
rate of change of field variable value leads to a need
for even higher performance in the response of the
mobile sensing system to environmental events. We
introduce two new Task Allocation algorithms used by
NIMS and present the results of performance analysis
obtained directly in the field and operating in the
forest reserve. In some cases, additional performance
analysis is obtained from measurements on a physical
testbed duplicate of NIMS that includes sensor data
records obtained from the field. This permits
reproducible, repeated measurements of the same events
for a probe of system performance.
Network Deployment using Robots
The ability to self-deploy and self-configure is of
critical importance for mobile sensor networks because
of the unattended nature of intended applications. The
network should be able to dynamically adapt its topology
to meet application-specific requirements of coverage
and connectivity. In static networks topology control is
achieved by controlling the transmission power or
sleep/wake schedules of nodes that are densely deployed.
In contrast, mobile sensor networks can exploit control
over node positions to affect network topology thus
eliminating the need for over-deployment and increasing
the net area sensed. A key challenge in achieving this
is that desired network properties are typically global
in nature (for example, degree of connectivity of a
network) while the nodes can only sense and act locally.
Our project focuses on understanding local properties
that control the global network topology and using these
to design control laws for self-deployment of mobile
networks. |
|
|
|
APPROACH
Multi-Robot Task
Allocation using a Sensor Network
Task
Allocation (TA) is the problem of assigning available
resources to tasks. There are two major subdivisions:
offline and online. Offline TA is the problem of
assigning resources to tasks if certain information
(e.g. the distribution of task arrival times, relative
task priority) is known a priori. The assignment process
proceeds offline. The offline TA problem, in its most
general form, is equivalent to the conjunctive planning
problem which is NP-Complete.
Our focus
is on online task allocation. In online TA, all
information about the tasks becomes available only upon
task arrival. The assignment of resources to tasks must
be computed in real time. It has been shown that greedy
algorithms provide good approximate solutions to online
TA. It has also been shown that in some cases the greedy
online TA solution is within a bounded limit of the
optimal solution obtained by offline TA. We think of
task assignment occurring in decision epochs. A decision
epoch is a period
of time during which only the tasks, which have arrived
since the end of the previous epoch, are considered for
assignment.
Increasing the decision epoch to infinity
converts the online TA into the offline TA problem. We
model the NIMS system as an online TA problem, since it
is designed for real-life autonomous field applications
in dynamic environments.
Our work
is related to the body of work on the problem of online
multi-robot task allocation (MRTA). The proposed TA
algorithm differs from existing MRTA approaches. It
relies on a static network, and communication, sensing,
and computation are distributed. The motivation for the
TA algorithm derives from the need to efficiently sample
the phenomena instead of the entire environmental
space. As has
been discussed in the introduction, it is impractical to
deploy sufficient numbers of fixed sensors to achieve
required sensing fidelity. As will be shown, the
system combining fixed and mobile nodes enables
efficient sampling. TA becomes the primary driver of
efficient data collection in this system, since it
allows the user to select a subset of the environment
for sampling, as opposed to sampling the entire
environment. In addition, TA manages system resources,
so that resources are not consumed unless assigned most
effectively.
Methodology
The
general online TA system functions in the following way.
Suppose at a given decision epoch the system maintains a
set of resources R = {r1, ...,
rn} and
tasks T = {t1, ...,
tk}. Tasks
are prioritized based on a criterion
C.
C is an
application dependent function and can combine such
parameters as task arrival time, task importance, etc. A
set of assignments A = (l = min(n,k):
{a1, ..., al}) is
computed as follows: |
|
|
|

|
|
|
|
where
t is the
next unassigned task according to
C and
U(rj,t) is the
j-th resource utility value for accomplishing
t. The
assigned resource and corresponding task are removed
from R and
T
respectively, before the next assignment. The utility
function is chosen to be application and resource
dependent. In our model, once assigned, resources cannot
be reallocated. After a resource has completed its task
it becomes available for a new assignment. We adopt a
commitment as opposed to an
opportunism strategy.
The
system consists of a mobile node suspended on a cable
and a static sensor network. We assume that the network
is predeployed where each node knows its location in a
global coordinate system. The network monitors the
environment for events of interest (motion, change in
light intensity, etc). The problem then is to prioritize
the events, and drive the mobile node to a vantage point
from which a particular event is better observed. Once
the node arrives at the event location, the local
phenomenon is measured. |
|
|
|
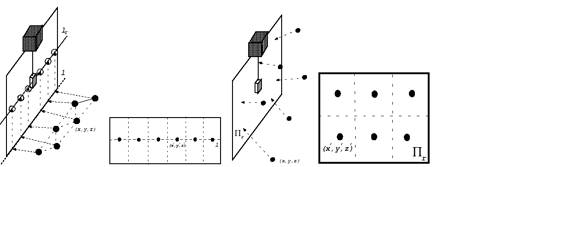 Different SN topologies
and corresponding projections onto the
transect Different SN topologies
and corresponding projections onto the
transect
|
|
|
|
terminology, a robot is a
resource and a
detection by a sensor node of an event requiring perusal
by a robot is a task.
Figure 1
shows two network topologies that we define - positioned
on the ground (the 2D-case) and more generally, in the
volume surrounding the transect (the 3D-case). In order
for the TA system to plan the node's motion the goal
points should lie in the transect plane. Hence, we
project the nodes locations onto the transect plane. As
a result we get a set of points on a line
l
(2D-case, Figure 1a) or a plane
¹r
(3D-case,
Figure
1c), both of which lie in the transect plane. In the
2D-case, l is the
line where the transect plane intersects the ground
plane. Since, the mobile node cannot move along that
line, we translate l to a
parallel line lr on the
transect. We define the projection function in the
2D-case PROJlr and
3D-case PROJ ¹r.
Based on
tasks projected locations TA divides the transect into
slices (2D-case,
Figure 1b), or generally cells (3D-case, Figure 1d). With
every projected node k we
associate a cell Cn.
Note that
a 2D system is sometimes preferred because it is easier
to setup in the field and for some applications a 2D
perspective is enough. As an example, consider studying
sunlight intensity shining through a forest canopy. In
this case a sensor network with illumination detectors
can be placed on the ground. Suppose node
k
discovered an interesting reading (say an abnormal light
value). The TA system then would guide the robot towards
the goal point on lr
computed by
PROJlr. The
mobile node then can study appropriate
slice
Ck. We
assume the general 3D-case system.
The
Task Allocation System
Our
system is a special case of the TA methodology described
above - with only one resource (mobile node) for task
assignment. We consider the problem of assigning tasks
one at a time. In this case the greedy assignment is
obviously optimal. Consider task assignment Equation 1.
Since there is only one mobile node, the next task with
highest
priority
(according to criterion C) is assigned to the mobile
node, no matter what the mobile node's utility function
might be. In our work we consider two basic greedy
policies, one based on a task's arrival time (we term it
the time policy)
and another based on the distance to the task (we term
it the distance policy). In our system these
policies essentially define the task prioritization
criterion C.
The Task
Allocation system consists of two algorithms, one
running on the static sensor nodes and the other on the
mobile node. The algorithm of static nodes is simple -
retrieve data from the sensors, process it, and deliver
to the mobile node via a wireless link.
The
algorithm running on the mobile node is as follows.
Suppose the mobile node receives the sensor data from
the static node i. This
data is analyzed and if there is a difference greater
than a threshold in the current sensor data with respect
to the previously stored value, a sampling task for the
sensor node i is
created. The task for the robot is then to travel to the
location of the node that generated the task (after that
a sampling policy can be applied to the vicinity of the
static node, but this is not our focus here). Next, if
the task generated by node i is not
stored in a set of currently active tasks
Ta, it is
added to this set. If the mobile robot is available for
the next task and Ta
0, the
next task is extracted from
Ta
according to the criterion C. We
implemented two policies for the criterion
C -
time
policy (tasks with smaller time stamp get priority) and
distance
policy (tasks closer to the robot get priority). Note
that since the system does not have any priori knowledge
about the spatiotemporal variation of event arrival,
simple greedy scheduling (time and
distance)
is appropriate. In our future work, as we will learn
more about the nature of the phenomenon, we plan to
incorporate that knowledge into the task allocation
process. Next, based on the task information the mobile
node needs to compute a goal point. If the task's
position is p then
the goal position will be
PROJlr
(p) in
2D-case and
PROJ ¹r
(p) in
3D-case (see Figure 1). The robot then moves to the
computed location of the task. After the robot completes
its last task it becomes available for
reassignment. |
|
|
|
Network Deployment
using Robots
We have
explored two approaches to this problem. One is based on
heuristics with minimal assumptions on the sensing and
communication capabilities of nodes. In the second
approach we assume that nodes have ideal disc like
communication ranges and use this analyze the geometric
properties of network topologies.
In prior
work, we developed a potential field based deployment
algorithm for mobile nodes that maximized coverage with
the constraint that each node has at least k neighbors
where k is a user-defined parameter. The algorithm used
two kinds of potential forces – a repulsive force that
causes the nodes to move away from each other to
maximize coverage and an attractive force that
constrains the node degree. By using a combination of
these forces, each node can maximize its coverage while
maintaining at least k neighbors. While there is a
strong correlation between average node degree and
connectivity of a network, we cannot guarantee that the
network will be connected.
To
address the problem of connectivity, we developed a
simple algorithm where the nodes broadcast heartbeat
signals to their neighbors at a regular rate. In
particular, a single node is chosen as the Òreference
nodeÓ (ex: Node with the smallest id) that starts the
heartbeat and every node that can hear it begins to
broadcast a heartbeat. As a result, the
nodes form a tree with the reference node as the root. A
repulsive potential field is used to maximize coverage
so that the nodes move away from each other while
ensuring that a satisfactory level of connectivity (ex:
signal strength of incoming messages) is maintained.
This
algorithm is completely asynchronous and distributed. In
addition, it is well suited for real radios that are
notoriously irregular. The total number of messages is
bounded by f*T per node where f is the frequency of the
heartbeat and T is the deployment time. Though the total
number of message exchanges is large, these messages can
be easily piggy-backed onto other messages so that the
additional communication cost for deployment is
minimized.
In our
second approach, we model the communication network as a
disc-graph and derive local conditions that can
guarantee network-wide properties. In particular, we
have focused on proximity graphs such as the Relative
Neighborhood Graph, Gabriel Graph, etc that are known to
have desirable properties in terms of connectivity,
sparseness and efficient communication paths (spanner
properties).
We have shown that regularly tiled graphs
maximize coverage in addition to providing desirable
connectivity properties. We have developed simple local
rules that can guarantee the formation of the above
proximity graphs. In this case, we assume that the nodes
can sense the positions of their neighbors relative to
themselves.
|
|
| |
| 
|








