Research topics Research topics While today's industrial robots are capable of
performing predefined motions in well- structured environment,
biological system can emergence their intelligence and elegant motor
behaviors through interaction with complex environment. The
intelligence can further be developed through the task realization
that is rich in environmental adaptation and diversity. Our research
team focuses on the bio-mimetic task realization, based on the
understanding of the human cognition and complex motor control
functions, such as environmental adaptation ability,
self-organization and decentralized cooperative task ability, we
develop soft and skillful environment adaptive robot systems.
Constructive research on environment adaptive robot is also a
necessary approach towards better understanding of biological
systems.
While today's industrial robots are capable of
performing predefined motions in well- structured environment,
biological system can emergence their intelligence and elegant motor
behaviors through interaction with complex environment. The
intelligence can further be developed through the task realization
that is rich in environmental adaptation and diversity. Our research
team focuses on the bio-mimetic task realization, based on the
understanding of the human cognition and complex motor control
functions, such as environmental adaptation ability,
self-organization and decentralized cooperative task ability, we
develop soft and skillful environment adaptive robot systems.
Constructive research on environment adaptive robot is also a
necessary approach towards better understanding of biological
systems.
Annual Reports of Research Activities: 2002, 2003, 2004
 Construction of A Dynamic Human Movement Analysis
Platform Construction of A Dynamic Human Movement Analysis
Platform
 A dynamic motion analysis platform is constructed to study the
nature of human movement. This system consists of a 3D motion
capture system which has 6 high-speed cameras, 8 force plates that
can measure 3 dimensional foot forces, 32ch EMG sensors and 10
3-axis acceleration sensors. The motion capture system performs
online the calculation of body motion from the camera inputs and
sends the data to the 3D virtual human CG for real time mimic of
human motions. Unlike usual systems that approximates the human
motion forces from the numerical differentiation of the calculated
angle information, this platform can obtain exact human motion
control force by integrating acceleration sensor information with
all other inputs, which makes it possible for deeper understanding
of human dynamic motion control functions and is thus useful for
bio-mimetic robots.
A dynamic motion analysis platform is constructed to study the
nature of human movement. This system consists of a 3D motion
capture system which has 6 high-speed cameras, 8 force plates that
can measure 3 dimensional foot forces, 32ch EMG sensors and 10
3-axis acceleration sensors. The motion capture system performs
online the calculation of body motion from the camera inputs and
sends the data to the 3D virtual human CG for real time mimic of
human motions. Unlike usual systems that approximates the human
motion forces from the numerical differentiation of the calculated
angle information, this platform can obtain exact human motion
control force by integrating acceleration sensor information with
all other inputs, which makes it possible for deeper understanding
of human dynamic motion control functions and is thus useful for
bio-mimetic robots.



A 3D Interactive Dynamic Simulation Platform and
Its Application in Developing Human Friendly Robots
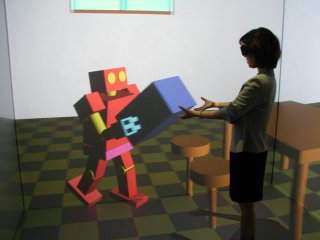 In this research, we construct a novel simulation
environment for developing human interaction robot. This system uses
AT-clone computers to calculate 3-dimensional dynamics and collision
of a robot when it interacts with human and projects the audiovisual
results using an immersion type display. Through dynamic calculation
of the robot, human can interact with it directly in real time. This
system makes it possible for us to design and examine the next
generation of human interactive robot easily and safely. Experiments
as a virtual robot interacts with human and performs dynamic motion
show the effectiveness of our system. In this research, we construct a novel simulation
environment for developing human interaction robot. This system uses
AT-clone computers to calculate 3-dimensional dynamics and collision
of a robot when it interacts with human and projects the audiovisual
results using an immersion type display. Through dynamic calculation
of the robot, human can interact with it directly in real time. This
system makes it possible for us to design and examine the next
generation of human interactive robot easily and safely. Experiments
as a virtual robot interacts with human and performs dynamic motion
show the effectiveness of our system.

  
Whole Body Manipulation using Soft Sensitive Skin
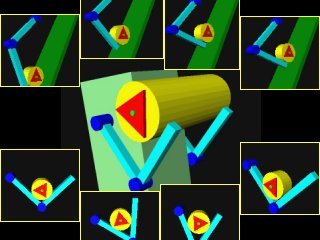 Unlike the present manipulator control technologies that operate
objects only by the robots' end-effectors, human beings can easily
perform whole body manipulation flexibly and safely. Bio-mimetic
research of such skillful human motor behavior is important not only
for deeper understanding of human sensations and nervous control
functions but also for developing of higher level robots. In this
study, we investigate modeling and control of multi-points whole
body interaction between a robot manipulator and its object. As an
example, we treat a 2-link planar Whole Arm Manipulation (WAM)
system and Whole Body Manipulation (WBM) system that operates a
circle object with dynamic and static arm frictions. Reasonable
dynamic tasks and stable postures during object's operation are
investigated from the optimal torque distribution point of view.
Cooperative manipulation of a more complex multi-linked object is
also studied.
Unlike the present manipulator control technologies that operate
objects only by the robots' end-effectors, human beings can easily
perform whole body manipulation flexibly and safely. Bio-mimetic
research of such skillful human motor behavior is important not only
for deeper understanding of human sensations and nervous control
functions but also for developing of higher level robots. In this
study, we investigate modeling and control of multi-points whole
body interaction between a robot manipulator and its object. As an
example, we treat a 2-link planar Whole Arm Manipulation (WAM)
system and Whole Body Manipulation (WBM) system that operates a
circle object with dynamic and static arm frictions. Reasonable
dynamic tasks and stable postures during object's operation are
investigated from the optimal torque distribution point of view.
Cooperative manipulation of a more complex multi-linked object is
also studied.
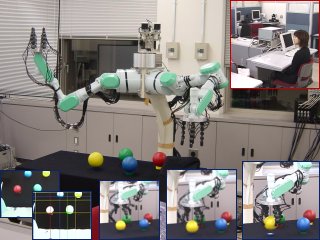
Network-based Integration and Control of
Decentralized Heterogeneous Function Modules of a Dual-armed
Redundant Robot
 An autonomous decentralized network control system of a
robot is constructed via internet. This robot has totally 49 D.O.F.
and can communicate with human to perform the required task based on
its sound recognition and vision information. In order to realize
real time control of so many D.O.F., 9 sets of AT-class PC are
involved in controlling each module, such as a head, two arms and
two multi-fingered hands, sound recognition and conversation as well
as visual recognition. A server is used to coordinate the discrete
events between each module. Bio-mimetic researches on hand
preshaping when approaching to a specific object, as well as body
languages with respect to the sound conversations are introduced
into the system so as to realize the human friendly interaction. An autonomous decentralized network control system of a
robot is constructed via internet. This robot has totally 49 D.O.F.
and can communicate with human to perform the required task based on
its sound recognition and vision information. In order to realize
real time control of so many D.O.F., 9 sets of AT-class PC are
involved in controlling each module, such as a head, two arms and
two multi-fingered hands, sound recognition and conversation as well
as visual recognition. A server is used to coordinate the discrete
events between each module. Bio-mimetic researches on hand
preshaping when approaching to a specific object, as well as body
languages with respect to the sound conversations are introduced
into the system so as to realize the human friendly interaction.

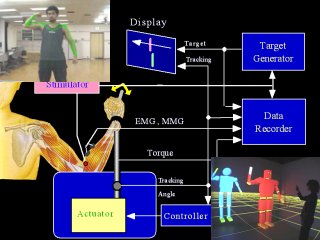
Immersion Type Tele-Interaction Manipulation
System
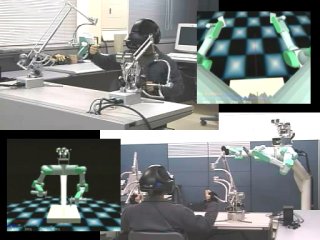 An immersion-type tele-interaction system is
constructed, which can realize the effect such that the human
operator feels as if he/she is directly within the body of the
virtual/or real robot and perform the real tasks via the real
robots. This technology has greatly extended the task ability as
well as performance of tele-manipulation. The developed system has
three levels of applications, they are: (1) The virtual robot along
can be used easily to test various bio-mimetic control algorithms,
such as learning cognitive behaviors.(2)The simulator together with
human interface can be used for training the human operator to
perform some cooperative tasks in complex environment. (3)The
overall system can be used to examine the cooperative
tele-manipulation including the physical environmental interactions. An immersion-type tele-interaction system is
constructed, which can realize the effect such that the human
operator feels as if he/she is directly within the body of the
virtual/or real robot and perform the real tasks via the real
robots. This technology has greatly extended the task ability as
well as performance of tele-manipulation. The developed system has
three levels of applications, they are: (1) The virtual robot along
can be used easily to test various bio-mimetic control algorithms,
such as learning cognitive behaviors.(2)The simulator together with
human interface can be used for training the human operator to
perform some cooperative tasks in complex environment. (3)The
overall system can be used to examine the cooperative
tele-manipulation including the physical environmental interactions.
  
Development of EAP Actuator and Its Robotic
Application
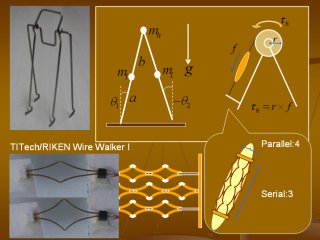 A
linear artificial muscle actuator using ionic polymer-metal
composites (IPMC), which is an electro-active polymer that bends in
response to low voltage (2 or 3 Volt) of electric stimuli, is
developing. This actuator owns many excellent properties as
biological muscle such as soft and silent. One of the main
objectives here is to apply it to the bio-mimetic robots especially
the biped robots since the back drive ability is important for
efficient biped walking. Within this linear actuator, the elementary
component consists of four IPMC films, two are connected by a
flexible conductive material. Such elementary units can be connected
with each in serial and parallel easily without electric short and
any spatial interference. A
linear artificial muscle actuator using ionic polymer-metal
composites (IPMC), which is an electro-active polymer that bends in
response to low voltage (2 or 3 Volt) of electric stimuli, is
developing. This actuator owns many excellent properties as
biological muscle such as soft and silent. One of the main
objectives here is to apply it to the bio-mimetic robots especially
the biped robots since the back drive ability is important for
efficient biped walking. Within this linear actuator, the elementary
component consists of four IPMC films, two are connected by a
flexible conductive material. Such elementary units can be connected
with each in serial and parallel easily without electric short and
any spatial interference.

  


Locomotion Control Based on Passive Dynamic
Walking
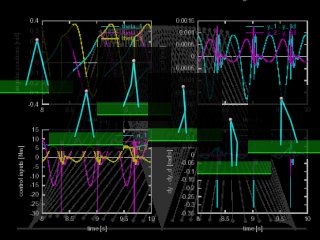 Human performs beautiful biped walking and can walk a long distance
with only small energy supply. This is because we effectively use
the gravity based on our body's physical dynamics. A robot should
also walk naturally based on its physical dynamics effectively. Such
a consideration is referred to as "dynamics based control". McGeer's
passive dynamic walking has been considered as a clue to elucidate
for natural and energy-effective walking. We analyze the mechanisms
of passive dynamic walking and apply it to gait generation for
actively controlled walkers. Throughout this study, we suggest that,
the dynamic bipedal walking can't be realized by only applying the
existing control theory but depends mainly on the deep understanding
of the complex physical characteristics of the mechanical system.
Human performs beautiful biped walking and can walk a long distance
with only small energy supply. This is because we effectively use
the gravity based on our body's physical dynamics. A robot should
also walk naturally based on its physical dynamics effectively. Such
a consideration is referred to as "dynamics based control". McGeer's
passive dynamic walking has been considered as a clue to elucidate
for natural and energy-effective walking. We analyze the mechanisms
of passive dynamic walking and apply it to gait generation for
actively controlled walkers. Throughout this study, we suggest that,
the dynamic bipedal walking can't be realized by only applying the
existing control theory but depends mainly on the deep understanding
of the complex physical characteristics of the mechanical system.
 
Development of Artificial Visual Cortex via FPGA
 Biological systems have fascinating abilities to process complex
spatial-temporal information within real time and to recognize their
changing environment via vision. Bio-mimetic study of vision system
will lead to dramatic improvement of robot's environmental
adaptability. By mimicking the neural network of retina, the silicon
retina can realize various useful spatial-temporal filtering
functions. Based on these filtered outputs, simple algorithm is
proposed to calculate optical flow of the moving object in the
complex image ground. In addition, by control the parameters of the
silicon retina, the vision system can adapt to the changing lighting
conditions and track the moving object. FPGA is successfully
applied, which greatly reduced the vision system's processing time.
Biological systems have fascinating abilities to process complex
spatial-temporal information within real time and to recognize their
changing environment via vision. Bio-mimetic study of vision system
will lead to dramatic improvement of robot's environmental
adaptability. By mimicking the neural network of retina, the silicon
retina can realize various useful spatial-temporal filtering
functions. Based on these filtered outputs, simple algorithm is
proposed to calculate optical flow of the moving object in the
complex image ground. In addition, by control the parameters of the
silicon retina, the vision system can adapt to the changing lighting
conditions and track the moving object. FPGA is successfully
applied, which greatly reduced the vision system's processing time.
 
Development of A General Robot Controller
 A light and small-size general robot controller is
developed and is succeeded applied to control a quadruped robot.
This controller is constructed in the form of a hierarchical modular
structure. The complex information processing of the robot's
environment and the corresponding robot's motion planning is
performed at the upper layer of AT-class PC network. The low layer
controller, with its size 9cm x 6cm, communicates between the upper
layer and the lower level controller to realize the real time
management of the robot motion, and the lower level modules (4cm x
3cm) have multi-channels of A/D, D/A and counters interfaces and can
easily interact with the actuators and sensors of the robot. A light and small-size general robot controller is
developed and is succeeded applied to control a quadruped robot.
This controller is constructed in the form of a hierarchical modular
structure. The complex information processing of the robot's
environment and the corresponding robot's motion planning is
performed at the upper layer of AT-class PC network. The low layer
controller, with its size 9cm x 6cm, communicates between the upper
layer and the lower level controller to realize the real time
management of the robot motion, and the lower level modules (4cm x
3cm) have multi-channels of A/D, D/A and counters interfaces and can
easily interact with the actuators and sensors of the robot.
  
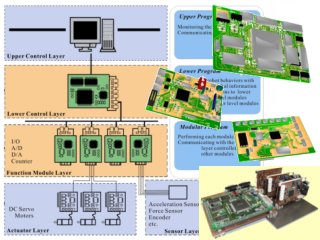
Autonomous Decentralized Control of a
Multi-legged Robot
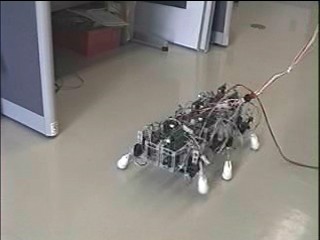 It is well known that the adaptive harmonic gait
patterns are mainly generated by the local interaction between
nervous oscillators in lower nervous system. A multi-legged robot,
named "Caterpillar", has been developed which uses a hierarchical
structure inspired by the animal's control structure. The upper
layer makes plan for the movement of the whole body, expressed by
weighted sum of three primitive motions, and broadcasts the weight
to the lower layer. The lower layer consists of six sub-systems and
has a modular structure. Each subsystem controls autonomously the
swing timing of its leg through the interaction between neighbors
and decides the leg trajectory according to the weights from upper
layer and its arranged position in the robot. Currently, the plan
for constructing a new robot, named MoNOLeg, is in progress. It is well known that the adaptive harmonic gait
patterns are mainly generated by the local interaction between
nervous oscillators in lower nervous system. A multi-legged robot,
named "Caterpillar", has been developed which uses a hierarchical
structure inspired by the animal's control structure. The upper
layer makes plan for the movement of the whole body, expressed by
weighted sum of three primitive motions, and broadcasts the weight
to the lower layer. The lower layer consists of six sub-systems and
has a modular structure. Each subsystem controls autonomously the
swing timing of its leg through the interaction between neighbors
and decides the leg trajectory according to the weights from upper
layer and its arranged position in the robot. Currently, the plan
for constructing a new robot, named MoNOLeg, is in progress.


|