 We have been researching and developing various technologies
for distributed real-time systems, which include processor architecture,
VLSI design, communications, operating systems, robotics, etc. "Real-Time"
means that the processing or communications should be completed untill
their specified deadlines in brief. The real-time systems have been
becoming more popular and important in recent years. The demands for
real-time systems have been becoming more complex, so that the systems
should be built as prallel/distributed systems. To build the
parallel/distributed real-time systems, the key technologies are the
real-time communications among nodes, the real-time processing
architecture in processors, and real-time operating systems.
We have been researching and developing various technologies
for distributed real-time systems, which include processor architecture,
VLSI design, communications, operating systems, robotics, etc. "Real-Time"
means that the processing or communications should be completed untill
their specified deadlines in brief. The real-time systems have been
becoming more popular and important in recent years. The demands for
real-time systems have been becoming more complex, so that the systems
should be built as prallel/distributed systems. To build the
parallel/distributed real-time systems, the key technologies are the
real-time communications among nodes, the real-time processing
architecture in processors, and real-time operating systems.
Hardware Group
 The members of the hardware group have been
designing and implementing Responsive
Multithreaded (RMT) Processor that is the next-generation of Responsive
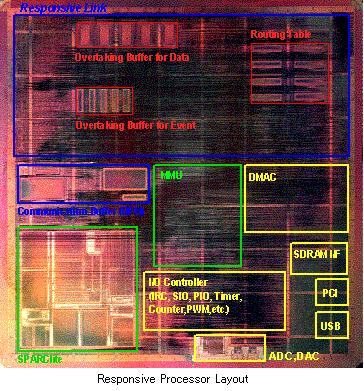
Processor. Responsive Processor is a system-on-a-chip (SoC)
that includes the processing core, Responsive Link for real-time
communication, and various I/O peripherals (SDRAM I/Fs, USB, PCI, ADCs,
DACs, PWM generators, etc.). Responsive Processor realizes
real-time communication by Responsive Link.
The members of the hardware group have been
designing and implementing Responsive
Multithreaded (RMT) Processor that is the next-generation of Responsive
Processor. Responsive Processor is a system-on-a-chip (SoC)
that includes the processing core, Responsive Link for real-time
communication, and various I/O peripherals (SDRAM I/Fs, USB, PCI, ADCs,
DACs, PWM generators, etc.). Responsive Processor realizes
real-time communication by Responsive Link. The members of the hardware group have been designing and implementing the new processing core for real-time processing named Responsive Multithreaded Processing Unit (RMT PU) that can simulutaneously execute multiple threads in real-time by hardware. We apply SMT architecture with priority to real-time processing. RMT PU also has the special vector units to realize high performance for multi-media processing.
Members
Nobuyuki Yamasaki,Tsutomu Itou,
Yoshitaka Fukute, Seiichi Arai, Nobuyuki Muranaka, Ikuo Magaki, Hiraku Nakamura,
Nobuaki Sakamoto
Interests
Our research focuses on the following
subjects:
| Bus
Architecture |
Software Group
We aim to provide new bases of software technologies for guaranteeing timing requirements of real-time applications under significant amount of uncertainty.
Members
Nobuyuki Yamasaki,Hidenori Kobayashi,
Tsuyoshi Hattori, Takahiro Sasaki, Shinpei Kato, Tetsuro Nakamura,
Kenji Funaoka, Yusuke Kutani
Interests
Our research focuses on the following
subjects:
Development of flexible computation models and
scheduling algorithms for handling unpredictable loads. The research aims
to provide a practical solution that can be easily applied to real-world
applications.
This area works on design and implementation issues
related to real-time operating systems. The goal is to provide real-time
guarantee without relying on excessive reservations of resouces.
Development of protocols for synchronization between
imprecise computations. The focus of the research is in how the properties
of imprecise computations can be utilized to increase overall performance
in terms of cost for blocking/unblocking and blocking delays.
| Task Migration |
Design and implementation of task migration scheme in
real-time cluster environment for high performance and high avilability.
Design and evaluation of flexible network management
and real-time channel construction algorithm for real-time communications.
Construction of real-time communication middleware
with extensibility in a multihop network. This model especially focuses on
memory-to-memory timing constraints.
Robot Group
 The robot group is investigating essential architecture for
modern robot systems.
The robot group is investigating essential architecture for
modern robot systems. We are applying Responsive Processor to robotics. Responsive Processor has many peripherals for controls such as A/D converters, D/A converters, PWM generators, PIOs, and so on. Various sensors and actuators can be connected directly to Responsive Processor and controlled. These specifications and properties are suitable for robot systems which consist of many sensors and actuators.
Members
Nobuyuki Yamasaki,Tetsuya Taira,
Nobuhide Kamata, Kouji Yamaura, Takao Yamakosi, Ken Shinoda,
Masao Ueyama, Yuta Kojima
Interests
Our research focuses on the following
subjects:
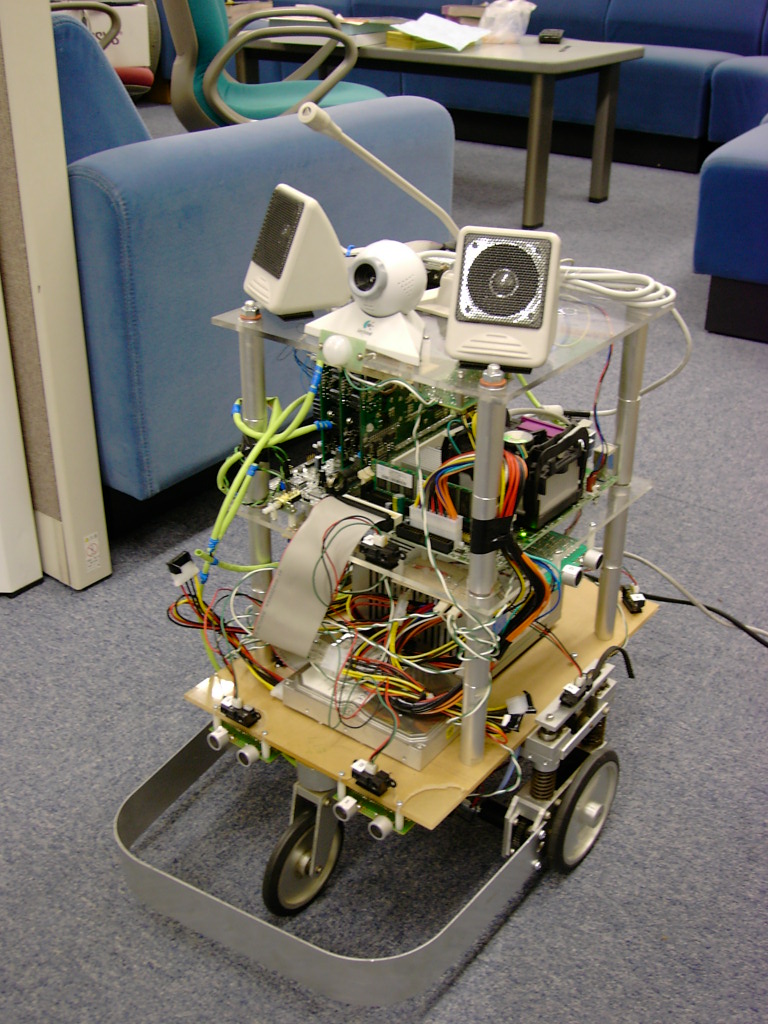
Design and implementation of a fuctionally distributed
control architecture for autonomous mobile robots. The robot system is
composed of several functional modules. Each module has a PU (Processing
Unit) and controls I/O peripherals independently. Asynchronous interrupts
are used among modules to inform of occurrences of events for controls. A
prototype robot is shown in the picture.
The application of a position estimation scheme for
autonomous mobile robots using Kalman Filter to a position and task
management system for office robots.
| Reconfigurable Modular Robot System |
Design and implementation of a software framework for
reconfigurable modular robot systems. The research aims to build a
block-type robot like LEGO where the form and functions can be changed
freely by the user. Function call mechanism which is independent on the
location of each module and common interfaces have been investigated, in
order to use functions of each module in the whole system.
| Plug-and-Play |
Development of software (middleware) architecture to
enable Plug-and-Play in modular robot systems. This includes design
protocols from a detection of structural changes to the reconfiguration of
the whole system, proposals for management scheme of the system
information and application programs, and implementation of function based
multi-threaded architecture.