Selforganizing Robot System
- Cooperation and Selforganization in a Distributed Robot System -
(more images)
Project Objectives
The overall objective of this project is to study the
capabilities of a novel architecture for a self-reconfigurable robot
system and to develop a suitable control software for it. Furthermore an
experimental platform for cooperation between robots in general shall be
provided.
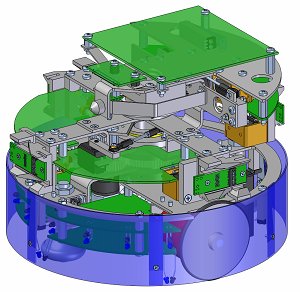
The speciality of the architecture is that each entity of the
robot system is a fully autonomous mobile robot but can also establish a
mechanical and electronical connection to other robots. By this several
entities can compose themselves to a a single robot with distributed
sensors and actuators and a network of distributed processors. Together
with the ability of each entity to equip itself with an individual
mounting (i.e. a pair of cameras, a gripper, a large power pack or other
sensors or actuators) this system is expected to be extreme flexible in
solving a wide range of tasks in an efficient way.
I also defined a mission to be performed by the system.
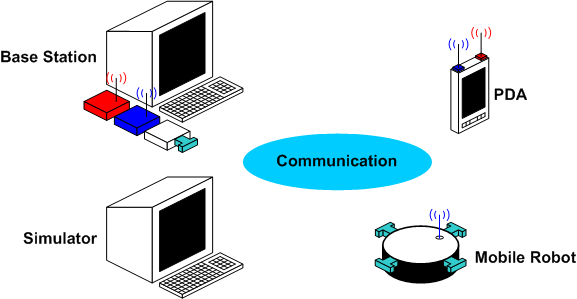
System Overview
|
The base station consists of a PC with some
additional hardware for communication with other the components of
the system, recharging connected robots and holding the individual
mountings. The software on the PC includes monitoring and
controlling of individual robots and a command interface for the
system as a whole. |