Mobile communication and processing platforms
[projects] [publications] [people]
List of projects
- Very low radiated power UWB communication
- Deployment of sensor networks
- Modular and composable platform for sensor and actuator networks
- Distributed odor source localization using a miniature multi-robot system
- Real-time avalanche and landslide analysis through sensor networks
Very low radiated power UWB communication
Contact: Prof. Jean-Yves Le Boudec Relevant publications
Deployment of sensor networks
Contact: Prof. Friedemann Mattern Relevant publications
This project addresses the deployment and programming problem of large-scale sensor networks in real-word settings. Its ultimate goal is to replace the current "trial-and-error deployment practice" with a systematic approach.
Applications
To allow the deployment of a wide range of sensor network applications.
The project assets
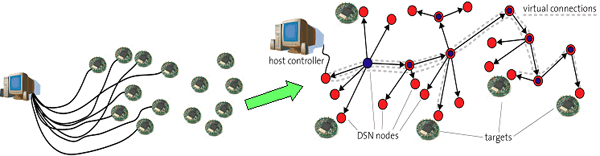
The project follows three different, but related research avenues: firstly, it explores the opportunities of so-called deployment support networks . These are separate wireless networks installed alongside the actual sensor network in order to observe, examine and control it.
Secondly, emphasis is put on distributed sensor network debuggers . They make use of deployment support networks to test and debug a target sensor network in real-world settings.
Finally, the project looks at global programming models . The goal is to achieve application development by programming whole sensor networks rather than individual nodes, and by focusing on application level concepts rather than system level concepts.
What has been achieved so far?
While a number of simulation tools and wired testbeds are currently in use, they cannot capture well many real-world influences for networks of realistic size. Also, good concepts for systematic testing and management of sensor networks are largely missing. The lack of appropriate tools and methods and their need in practice motivates the research goals of the project.
Where does the project stand now?
A first prototype of a deployment support network has been developed. Possible approaches for global programming models have also been considered. One such approach called generic role assignment supports the automatic assignment of roles to sensor nodes.
Modular and composable platform for sensor and actuator networks
Contact: Prof. Thomas Henzinger Relevant publications
 The aim of this research project is to investigate composable
platforms for wireless sensor and actuator networks
The aim of this research project is to investigate composable
platforms for wireless sensor and actuator networks
It is intended to use the methods and concepts developed in this project for applications in building automation.
The project assetsIts expected outcomes are a software and hardware methodology that enables modular composition and configuration of sensor/actuator nodes.
A method will be developed for local and global composable analysis of essential resource properties such as energy, buffet space and timing.
What has been achieved so far?In the past years, complete hardware platforms for wireless sensor networks have been developed, both in industry and research. But with the increasing complexity of applications, a strictly organized and layered software structure is indispensable.
Where does the project stand now?The project is just starting.
Distributed odor source localization using a miniature multi-robot system
Contact: Prof. Alcherio Martinoli Relevant publications
 This project seeks to use a multi-robot system for chemical
plume mapping and source localization. The challenge is to integrate in a
single robotic miniature node olfaction, anemometry, communication, and
navigation capabilities.
This project seeks to use a multi-robot system for chemical
plume mapping and source localization. The challenge is to integrate in a
single robotic miniature node olfaction, anemometry, communication, and
navigation capabilities.
Several applications can be considered for such collective robotic system, including detection of industrial leaking and hazardous waste clean up operations. However, among the most challenging application areas there is humanitarian demining. In the global effort against landmines and unexploded ordnance, the international mine action community is constantly aiming at improving safety, efficiency, and cost-effectiveness of clearing methods. Among the most promising sensory modality which can possibly be used in a landmine clearance operation is olfaction. One of the main interest of this MICS project is to replace trained animals by a fully artificial system in this delicate task.
The project assets:Area reduction is an aspect of the demining process in which machines could significantly speed up the mine clearance work. Currently, olfactory techniques appear to be among the most promising methods for area reduction. The main outcomes of this project are therefore expected not only in humanitarian demining but also in robotics, as well as in information science and technology. A miniature multi-robot system will be conceived to map and locate the source of a chemical plume and relay such information to an operator. Furthermore, the work will contribute to the field of collective robotics by enhancing machine-learning methodologies for automatic design and optimization of groups of robots. This case study should allow for an extension of the current multi-level modeling methodology developed for distributed manipulation and distributed coverage experiments in collective robotics to distributed search experiments such as that considered in this project. Finally, as for information science and technology, it is expected that original, scalable, robust algorithms for sensor fusion, unit coordination, and collective navigation will be produced.
What has been achieved so far?Professor Alcherio Martinoli, while working at the California Institute of Technology (Caltech), has participated for about one year and a half in the DARPA-ONR Chemical Plume Tracing Program. This effort has resulted in a series of publications culminating in two journal papers [Hayes02, Hayes03]. In addition to being able to detect the plume it its distal zone rather than only in its proximity as most of the previous robotic efforts did, Prof. Martinolis group demonstrated for the first time that collective source localization was feasible and increased the performance of a single robot depending on the search scenario. Due to practical issues and time limitation, they only demonstrated the localization of a water vapor source in a laboratory environment with groups as large as six robots. No wind tunnel experiments were carried out at Caltech and no thorough theoretical investigation about the implemented distributed, bio-inspired search algorithms was performed. Such scientific questions will be instead addressed at EPFL in the framework of this project, in particular in order to understand whether it is possible to go beyond bio-inspired solutions for increasing efficiency and robustness of the distributed olfactory system.
Where does the project stand now?The project will start in Fall 2005. No research in the framework of this project has been performed so far at EPFL.
Real-time avalanche and landslide analysis through sensor networks
Contact: Prof. Edoardo Charbon , Christophe Ancey Relevant publications
 This project aims at gaining insight into the dynamics of rapid
gravity-driven flows, such as avalanches and earth mass movements, by
using a sensor-network based monitoring system.
This project aims at gaining insight into the dynamics of rapid
gravity-driven flows, such as avalanches and earth mass movements, by
using a sensor-network based monitoring system.
Applications
To improve fluid-mechanics models describing the flow behavior of avalanches. The system can also be used for hazard warning purposes (e.g., for detecting acceleration of a landsliding mass), thus enabling appropriate measures to be taken on time to minimize loss of life or for rescue operations (e.g., to detect skiers buried in an avalanche).
The project assets
The sensor network measures the displacement/velocity field inside a flowing bulk. Before the material is released, the sensor nodes are spread onto the surface or inside the material. After release, the information of each node is monitored to determine the flow structure.
The main tasks are twofold: constructing a sensor network and interpreting the data to build more accurate fluid-dynamics models.
At the core of the monitoring system is a network of sensor nodes. To achieve an accuracy of a few centimetres, ultra- wideband radio links is implemented and novel algorithms are used. For the data interpretation, the project will benefit from a new instrumented platform at EPFL (inclined channel), where the method could be tested against lab avalanches.
What has been achieved so far?
The fluid-dynamics models used so far in predicting mass movements such avalanches rely on speculative equations and very few is known about the internal structure of avalanches. Field measurements only provide insight into shape characteristics (e.g., avalanche speed).
Where does the project stand?
Preliminary experiments are ongoing to simulate mass movements in a well-controlled environment on the lab scale. Prior to testing the sensor efficiency in the field, we must be able to determine the flow structure using independent measurement techniques in the lab. Particle imaging techniques will be used.
The National Centres of Competence in Research (NCCRs) are a research instrument of the Swiss National Science Foundation.
© MICS 2005 - update 10-3-2005 - mailto:mics.webmaster@epfl.ch