In these experiment the camera moves in a diagonal trajectory, parallel to the background and foreground surfaces. At each step the camera translates 4mm horizontally and 4mm vertically which corresponds to a total translation of 5.6569 mm.
In the images this corresponds to a 2.25 pixel translation for the foreground image and a 0.66 pixel translation for the background.
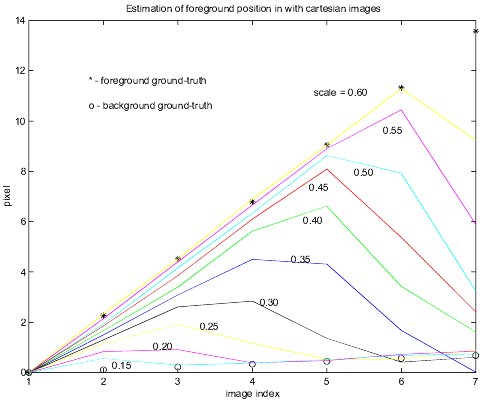
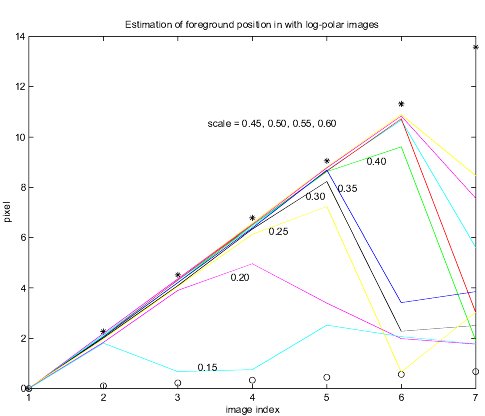
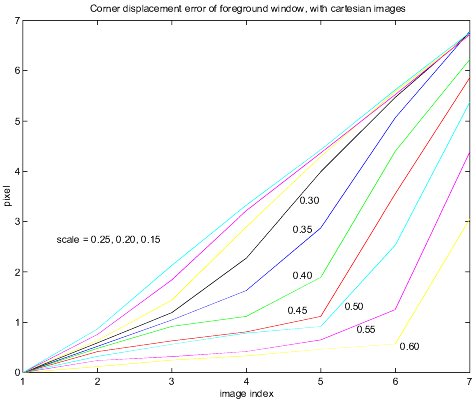
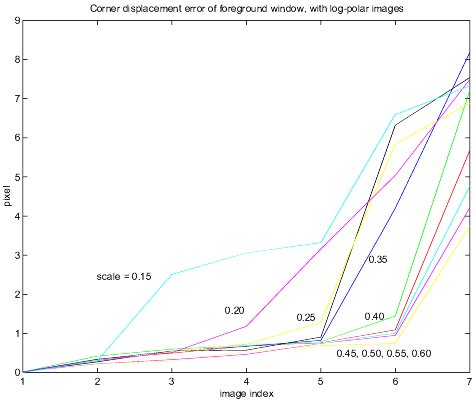
We show the obtained results with both the log-polar and cartesian versions of the algorithm, and for several foreground object scales.
We present plots of the estimated centroid of the object in the retinal image and compare with ground-truth values. Also we present a plot of one index that expresses the error on computing the overall transformation and not just the centroid. This error is computed as the norm of a vector containing the displacements of the corners of the window containing the foreground object from its ground-truth value.
| Cartesian | Log-Polar | |
| Centroid | cartcentro1step.jpg | logcentro1step.jpg |
| Matching Error | cartcanto1step.jpg | logcanto1step.jpg |
From these plots we can observe that for the same object size, with log-polar images the algorithm breaks down later, i.e. is able to estimate larger displacements, or equivalently, for the same displacement we can have smaller objects.
The following table summarizes some of these results. The break down is measured when error on the centroid or the matching error are bigger than 1.5 pixel.
| Range | Cartesian Break-Down (effective area scale) | Log-Polar Break-Down (effective area scale) |
| 1 step = 2.25 pixel | 4.76% | n.a. |
| 2 step = 4.5 pixel | 19.04% | 6.06% |
| 3 step = 6.75 pixel | 25.92% | 10.78% |
| 4 step = 9 pixel | 33.85% | 16.84% |
| 5 step = 11.25 pixel | 52.89% | 43.10% |
{kind=link}
{kind=link}
{kind=link}
{kind=link}