 |
HOME |  |
Research | |
Publications | |
CVisions |
|
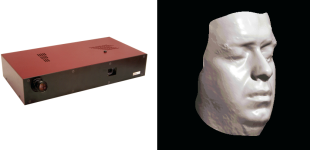
The project has the aim of creating a hyper-realistic representation of a non-rigid shape (for example, a hand moving or a face under different facial expressions). In order to achieve this result, the project will use a state-of-the-art machine for 3D reconstruction from REVERSE.
|
|
There is a high need for these dense 3D deformable models in many engineering fields, i.e. biomechanical modelling of limbs and evaluation of athlete performances, and in the entertainment industry (computer animation of digital characters). The standard approach is to use motion capture systems such as a VICON which can track a set of sparse markers lying over the human body. For instance this video shows the output from a VICON system in the AHI lab of Queen Mary University of London.
|
|
However, the information extracted by these systems is very sparse (a set of points in 3D) but still enough to obtain the description of basic biomechanical properties of joints and their motion in the 3D space. In a previous project we have extracted the joint location (marked with a red cross) for a sequence with an arm moving by means of the mentioned VICON system.
|
|
Our machine from REVERSE now offers us new perspectives. We plan to augment deformable and articulated models to a higher level of realism, where a model is defined with a dense mapping of the shape in 3D. In this way, subtle but important details such as skin and muscle deformations may be finally grasped by observing the real 3D motion of shapes and not from a priori synthetic models. In order to do so, we need to overcome a present limitation of the REVERSE machine since it is not able to extract 3D information in real-time. This feature is a focal point since, in order to fulfill motion analysis, we need to observe a set of closely spaced frames describing the shape deformations.
|
Project ObjectivesA new system for the 3D reconstruction of non-rigid shapes which may have a relevant impact in science engineering. The candidate will learn solid basis in Computer Vision and new sensor technologies for visual reconstruction. These tasks will let the candidate work on a real and innovative system for 3D acquisition with the possibility to make considerable impact in the 3D modelling field. Required skills are an entry-level knowledge of MATLAB scientific language. Knowledge on Image processing and Computer Vision are a plus for this project. For further questions please contact:Prof. João Paulo Costeira. Torre Norte, Piso 7, Room 7.18 Dr. Alessio Del Bue Torre Norte, Piso 7, Room 7.25 Phone Number: 2299 |
| Updated Apr 2009 by Alessio Del Bue |